로봇이 실제 환경에서 자율적으로 움직이고 작업을 수행하려면, 매우 많은 수의 학습 데이터가 필요하다.
하지만 현실에서 그 데이터를 직접 수집하는 것은 비용이 많이 들고 시간이 오래 걸린다.
그래서 NVIDIA는 GR00T 생태계라는 이름으로, 로봇이 학습할 데이터를 자동으로 생성하고, 증폭하고, 학습하고, 추론까지 이어지는 전체 파이프라인을 제시하고 있다.
이 문서에서는 특히 그 중에서 GR00T-Dreams와 GR00T-Mimic이 어떻게 다른지, 그리고 어떻게 로봇이 사용할 수 있는 학습 데이터를 만들어내는지 정리한다.
GR00T는 단일 모델이 아니라, 로봇 학습 전체 파이프라인을 구성하는 여러 구성요소들의 생태계이다.
GR00T 생태계 구성요소
즉, Dreams와 Mimic은 데이터 생성 단계, Isaac Lab은 학습 단계, RFM은 실행 단계라고 이해하면 된다.
개념
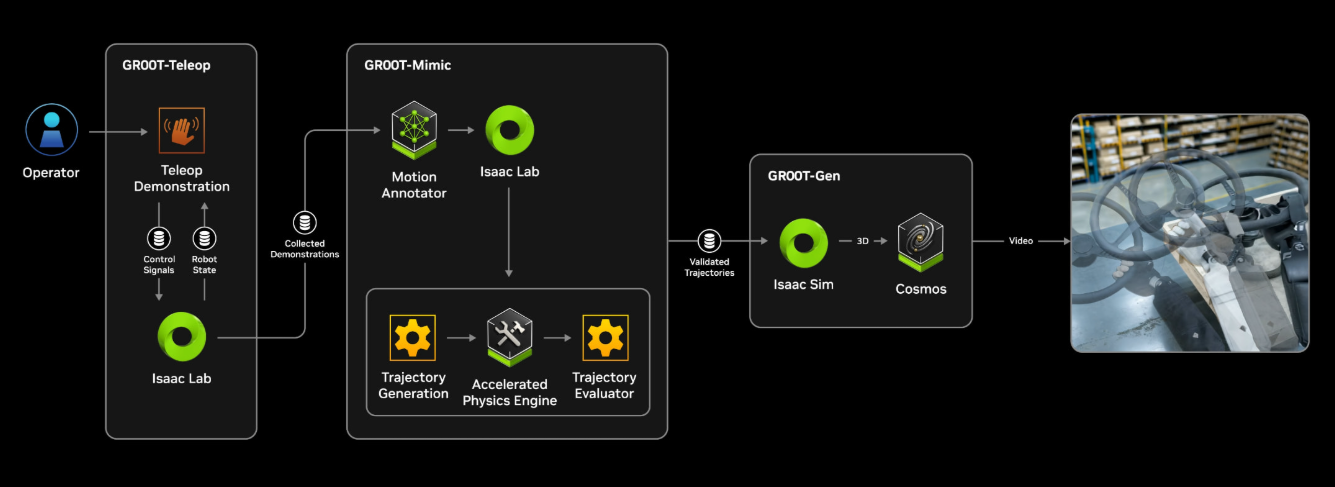
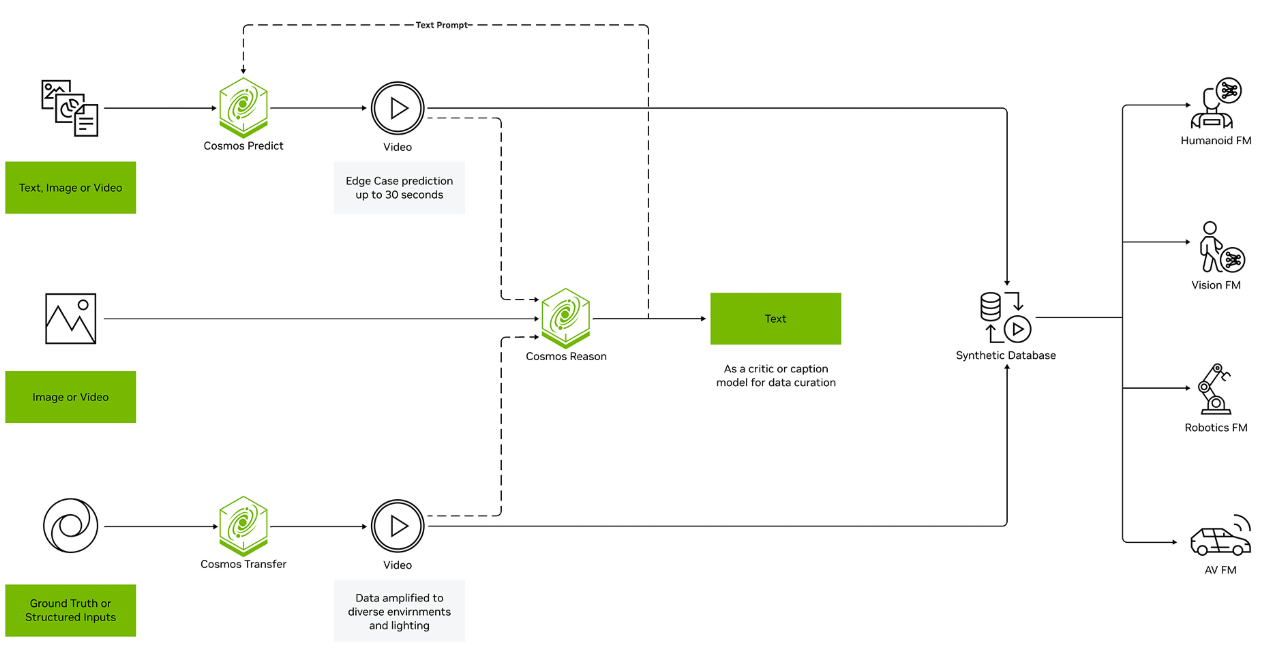
Mimic은 말 그대로 기존에 가지고 있는 시연 데이터(demonstration)를 모방하고, 변형하고, 확대하는 파이프라인이다.
입력은 다음과 같다:
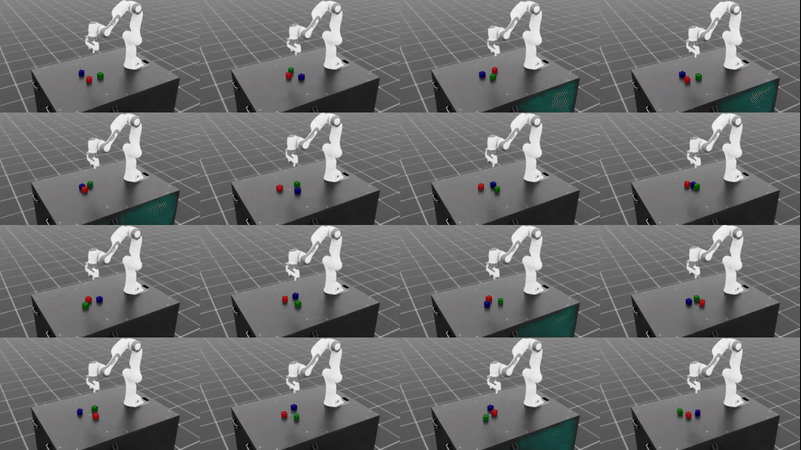
이러한 데이터에서 환경을 바꾸거나, 조명·배치·속도·물체 상태 등을 다양하게 바꿔서 새로운 학습 데이터를 대량 생성한다.
특징
요약
Mimic은 “기존 작업을 잘하게 만드는” 데 최적화된 방식이다.
개념
Dreams는 처음부터 새로운 작업 시나리오를 만든다.
아주 적은 입력만으로도 시작할 수 있다.
예시:
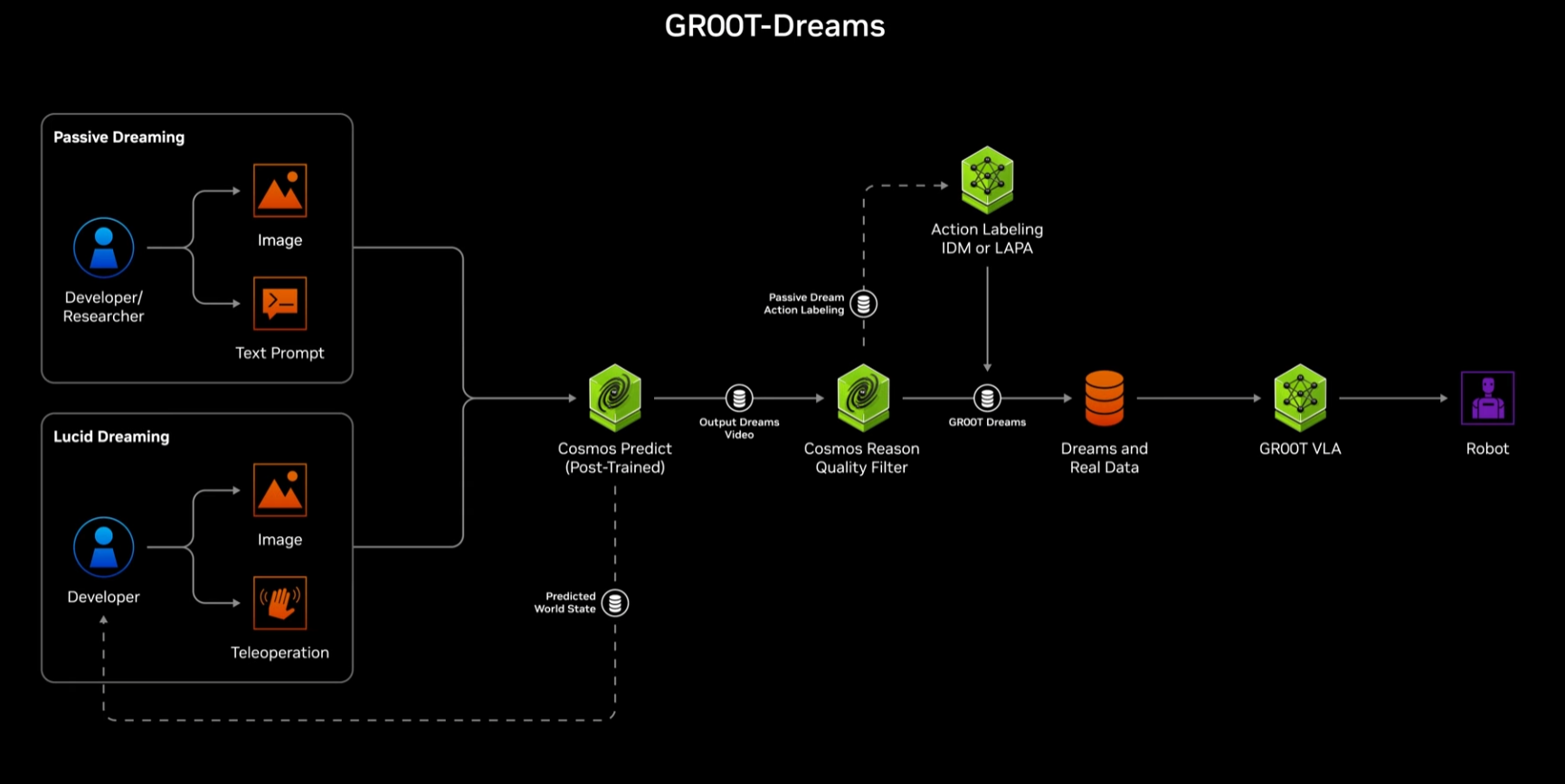
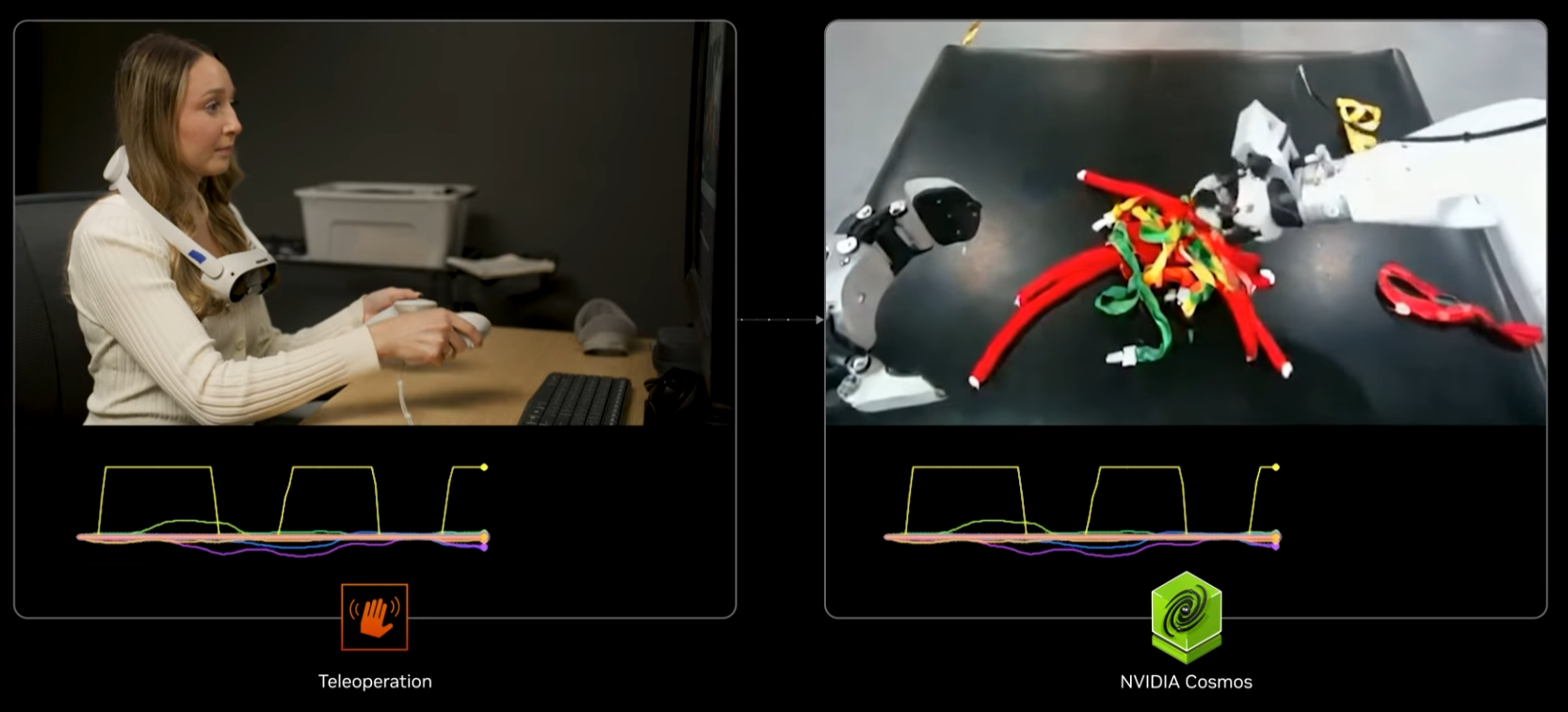
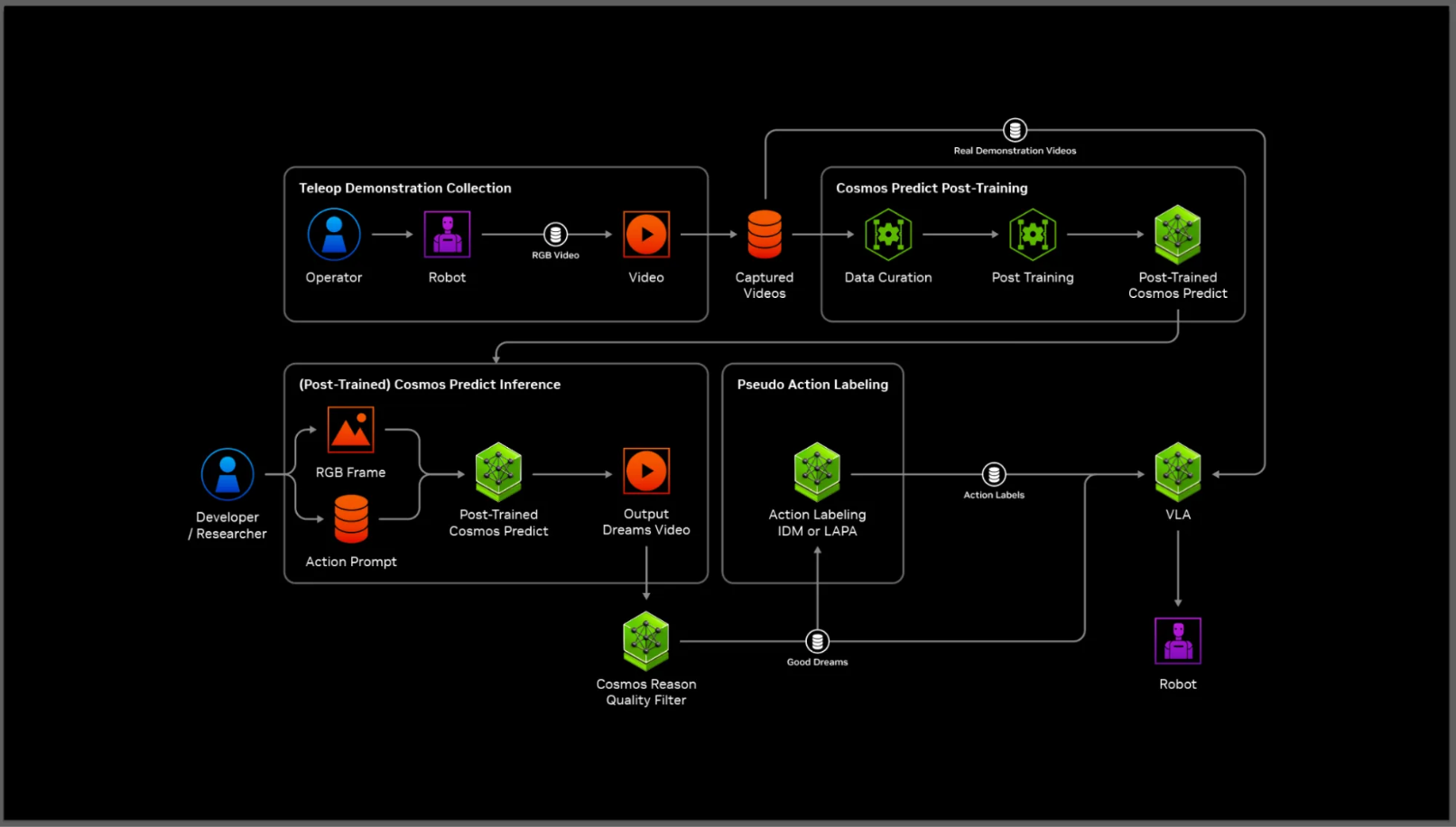
Dreams는 이렇게 최소 입력을 기반으로 행동 비디오를 생성하고, Cosmos가 그 비디오를 분석하여 로봇이 실제로 학습할 수 있는 trajectory로 변환한다.
핵심 특징
많은 사람들이 “Dreams는 그냥 비디오 생성 기술 아닌가?”라고 생각한다.
하지만 진짜 중요한 것은 비디오 이후 단계이다.
Dreams는 비디오를 생성한 뒤, 로봇 학습에 필요한 구조화된 데이터로 변환하는 전체 파이프라인을 포함한다.
즉, Dreams는 비디오 → 3D Pose → 로봇 trajectory → 물리 기반 토크로 이어지는 전체 변환을 수행한다.
여기서 Dreams의 기술력이 가장 잘 드러난다.
① DreamGen: 행동 비디오 생성

② Cosmos Predict/Reason: 3D Pose Reconstruction
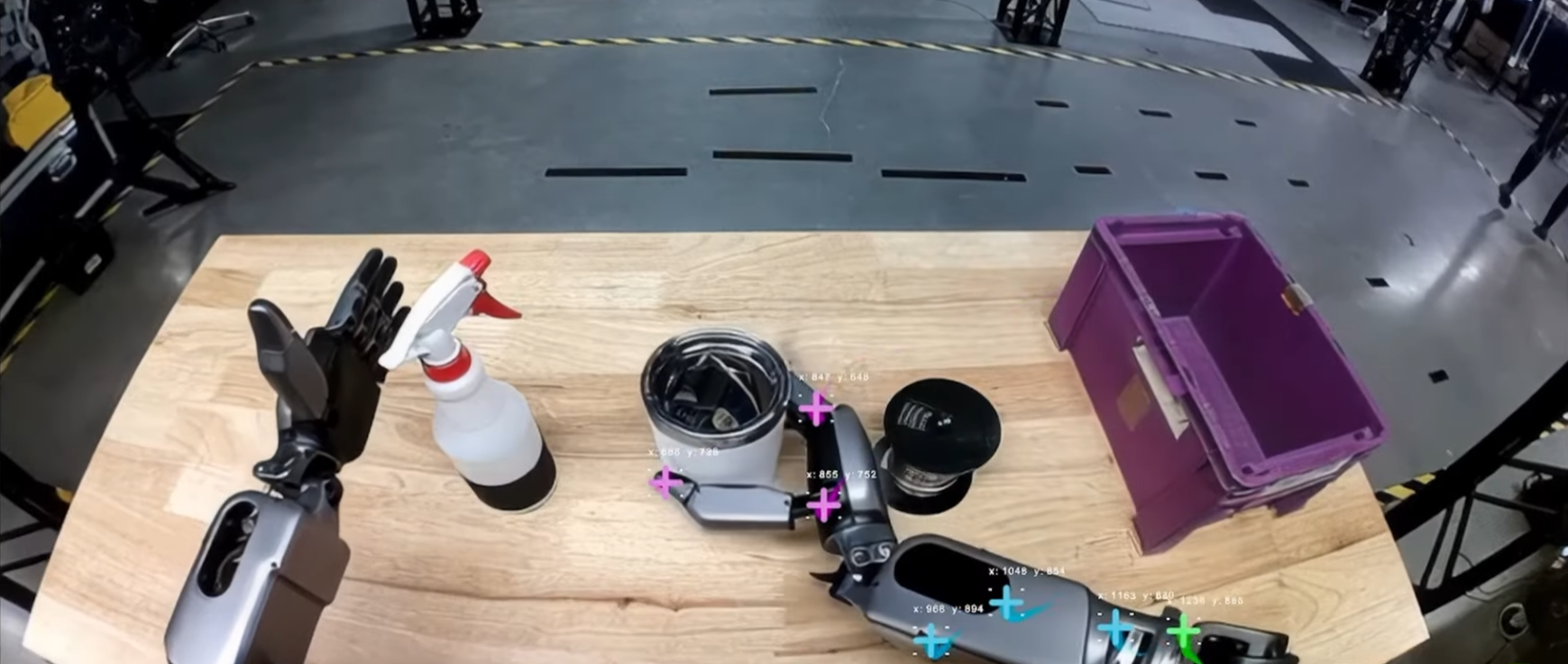
비디오의 각 프레임에서 다음이 추출된다.
픽셀 기반 영상이 3D 구조화 동작으로 바뀌는 단계다.
③ Retargeting: 인간 동작 → 로봇 관절공간
이 3D 인간 행동을 로봇 관절공간(q, qdot)으로 변환한다.
이 단계에서 Action Tokens(로봇 행동 표현) 가 생성된다.
④ Inverse Dynamics: 물리량 재구성
로봇이 실제로 실행하려면 필요한 다음 물리값을 계산한다.

결과적으로 Dreams는 로봇이 즉시 정책 학습에 사용할 수 있는 완전한 trajectory 데이터를 생성한다.
| 항목 | GR00T-Mimic | GR00T-Dreams |
|---|---|---|
| 출발점 | 기존 시연 데이터 | 최소 입력(텍스트/이미지/짧은 시연) |
| 목적 | 숙련성 향상(known task) | 범용성 향상(novel task) |
| 방식 | 데이터 증폭(augmentation) | 새로운 시나리오 생성 |
| 기술 | Isaac Sim + Cosmos-Transfer | DreamGen + Cosmos Predict/Reason |
| 결과물 | 기존 작업 변형 데이터 | 새로운 작업 trajectory & 물리데이터 |
Dreams와 Mimic은 서로 목적과 기술이 다르지만, 둘 다 로봇 학습 데이터 확보에서 핵심적인 역할을 한다.
Training Humanoid Robots With Isaac GR00T-Dreams
https://www.youtube.com/watch?v=pMWL1MEI-gE
Teaching Robots New Tasks With GR00T-Dreams
https://www.youtube.com/watch?v=QHKH4iYYwJs
GR00T: NVIDIA Humanoid Robotics Foundation Model
https://www.youtube.com/watch?v=ZSxYgW-zHiU
Isaac GR00T-Mimic: Isaac Lab Office Hour
이 글 공유하기: