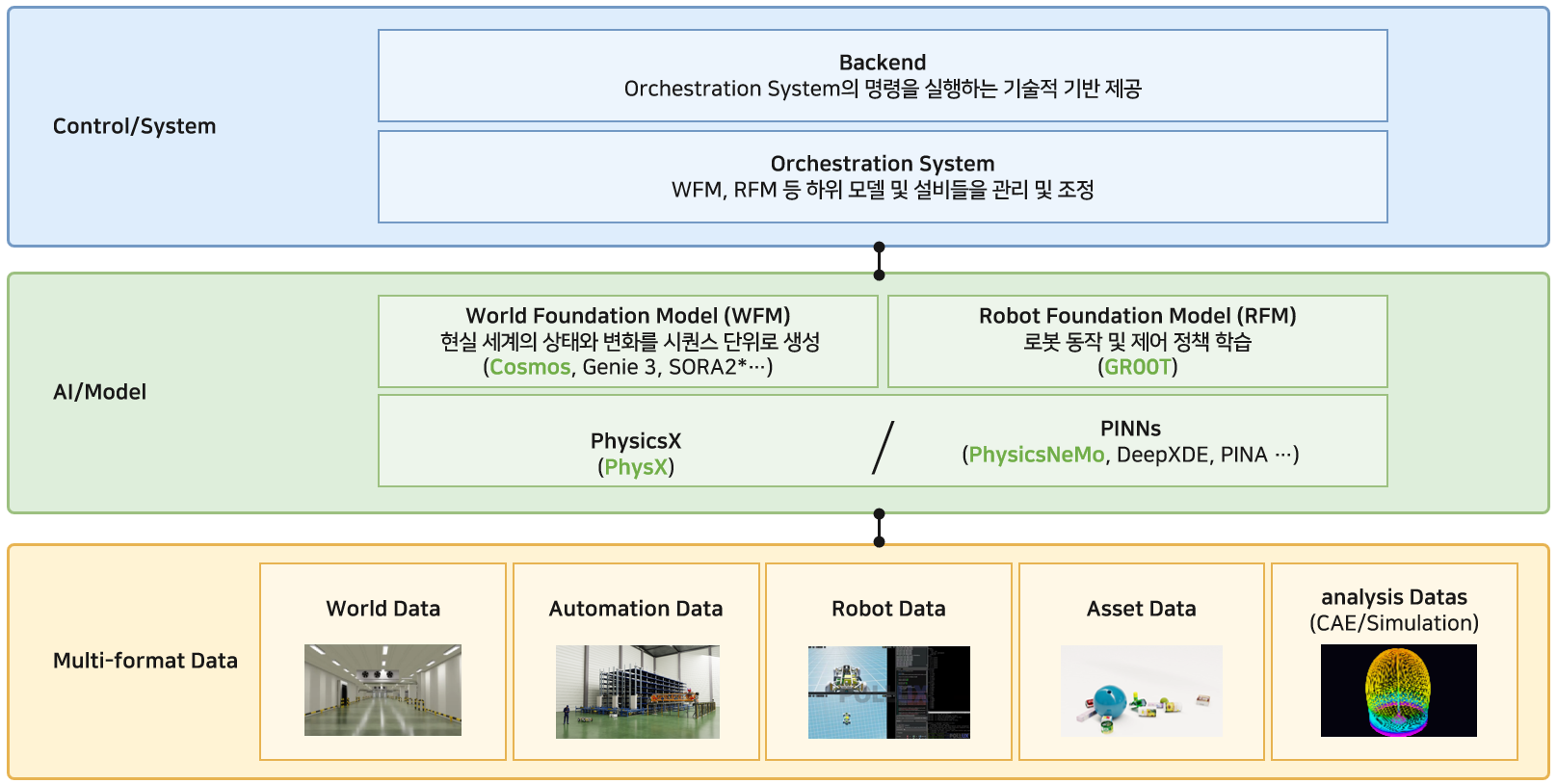
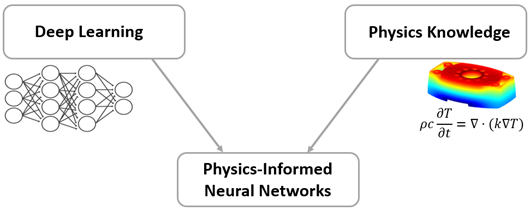
PINNs(Physics-Informed Neural Networks)는 물리적 제약을 내장한 해석적 신경망,
World Model은 환경의 동역학을 압축·예측하는 표상 모델,
Robot Foundation Model은 행동과 지각을 통합하는 거대 행위 모델이다.
┌────────────────────────────────────────────┐
│ Physics Layer (PINNs) │
│────────────────────────────────────────────│
│ • 물리 방정식 내재화 (PDE, 경계조건) │
│ • 연속적 해 함수 학습 │
│ • 물리적 합성데이터 생성 │
└──────────────┬─────────────────────────────┘
│ 물리적 일관성 데이터 전달
▼
┌────────────────────────────────────────────┐
│ Cognitive Layer (World Foundation Model) │
│────────────────────────────────────────────│
│ • 환경 동역학의 내적 표현 (latent dynamics) │
│ • 반사실적 예측 / 상상 세계 생성 │
│ • 물리 기반 월드모델 학습 │
└──────────────┬─────────────────────────────┘
│ 시뮬레이션된 환경 제공
▼
┌────────────────────────────────────────────┐
│ Behavioral Layer (Robot Foundation Model) │
│────────────────────────────────────────────│
│ • 비전/언어/행동 통합 학습 │
│ • 일반화된 행동 정책 학습 │
│ • 시뮬레이터에서 실제로의 스킬 전이 │
└──────────────┬─────────────────────────────┘
│ 현실 피드백 (센서, 행동 결과)
▼
┌────────────────────────────────────────────┐
│ Feedback Loop (Self-Consistency) │
│────────────────────────────────────────────│
│ • RFM → WFM : 예측 정확도 보정 │
│ • WFM → PINNs : 물리 경계 재조정 │
│ • PINNs → RFM : 물리적 안정성 보증 │
└────────────────────────────────────────────┘

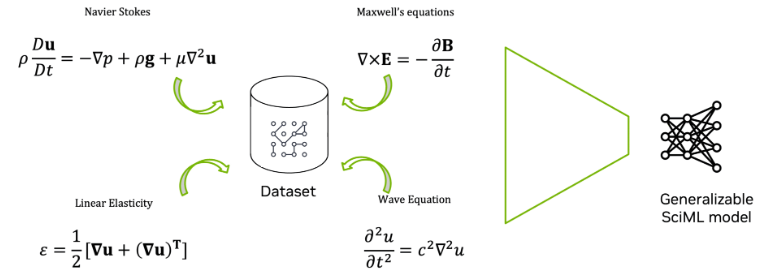
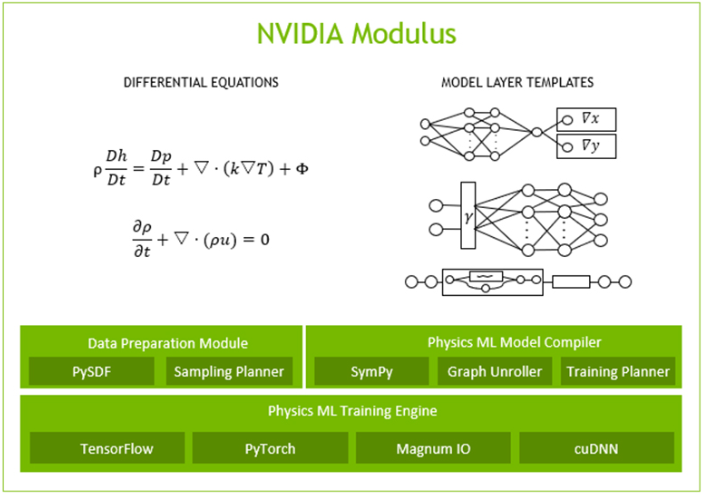
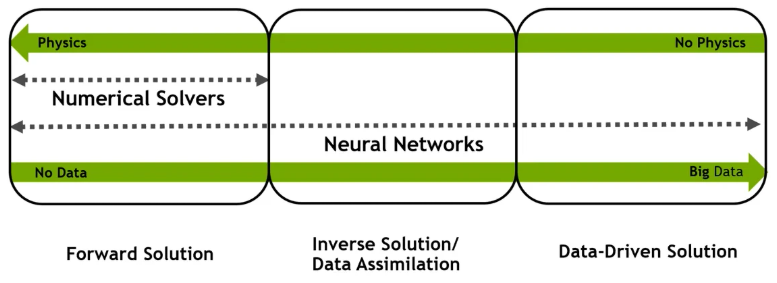
PINNs는 물리 법칙을 직접 손실 함수에 포함시켜, 해당 방정식을 만족하는 함수를 학습하는 신경망이다.
전통적인 수치해석(FEM, CFD 등)은 공간을 격자 단위로 나누어 각 점의 해를 반복 계산하지만, PINNs는
공간 전체를 하나의 연속적 함수로 근사한다.
즉, 신경망은 특정 점의 값을 외우는 대신 물리 방정식을 만족하는 해의 형태 자체를 내면화한다.
핵심은 ‘물리 기반 학습’이다. PINNs는 PDE와 경계조건을 직접 학습 목표로 삼기 때문에, 데이터가 부족해도 학습이 가능하다. 새로운 경계나 조건에서도 일반화 능력이 높고, 물리 시뮬레이션의 계산량을 줄이며
물리적으로 일관된 합성데이터를 대규모로 생성할 수 있다.
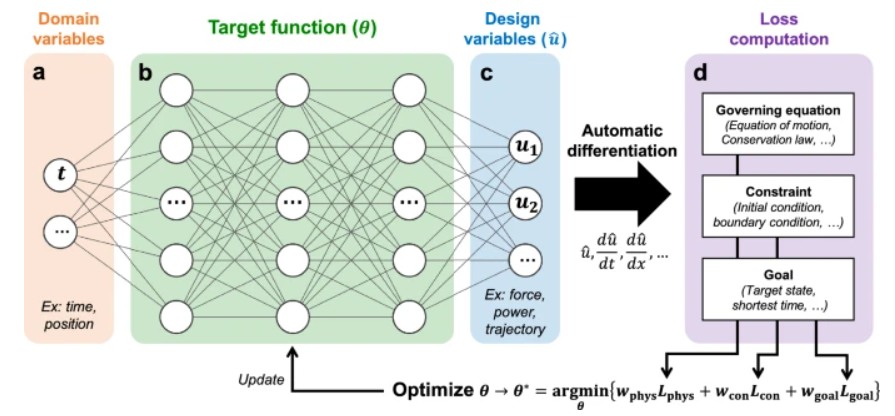
PINNs의 가장 1차적이고 명시적인 목표는
“미분방정식을 만족하는 해(solution)를, 데이터가 아니라 신경망의 구조 속에서 근사하는 것.”
즉, 기존의 유한요소법(FEM)이나 CFD처럼 수치적으로 미분방정식을 푸는 것이 아니라,
그 방정식이 ‘성립하도록 만드는 함수’를 직접 학습하는 것이다.
이 접근은 근본적으로 “계산”이 아니라 “표현”이다.
그 결과, PINN은 한 번 학습되면 어떤 시점이든 어떤 좌표든,
격자 밖에서도, 연속적 해를 즉시 산출할 수 있다.
현실의 물리 현상은 거의 항상 서로 다른 이론 영역이 맞닿은 접합부에서 일어난다.
전통적 수치해석은 이런 영역(Fluid, Structure, Thermal 등)을 별도의 방정식 체계로 분리하고, 경계면에서 수치적으로 값을 교환(coupling)한다. 이 과정에서 불연속성이나 수렴 불안정성이 자주 생긴다.
PINNs는 여러 물리 방정식을 하나의 신경망 함수로 통합적으로 학습한다.
즉,유체 도메인의 PDE, 고체 도메인의 PDE, 열 방정식이 각각 다른 형태를 띠더라도, 그들의 해를 모두 하나의 연속 함수안에서 근사한다.
결과적으로 PINNs는 각 이론의 독립성을 유지하면서도, 그 경계면을 자연스럽게 이어주는 연속적 표현 공간을 제공한다.
https://github.com/lululxvi/deepxde
https://github.com/mathLab/PINA
PhysicsNeMo
오픈소스 물리-ML 프레임워크. PINNs/FNO 등 최신 SciML을 대규모로 학습, 추론하는 파이프라인을 제공(오픈소스, Python).
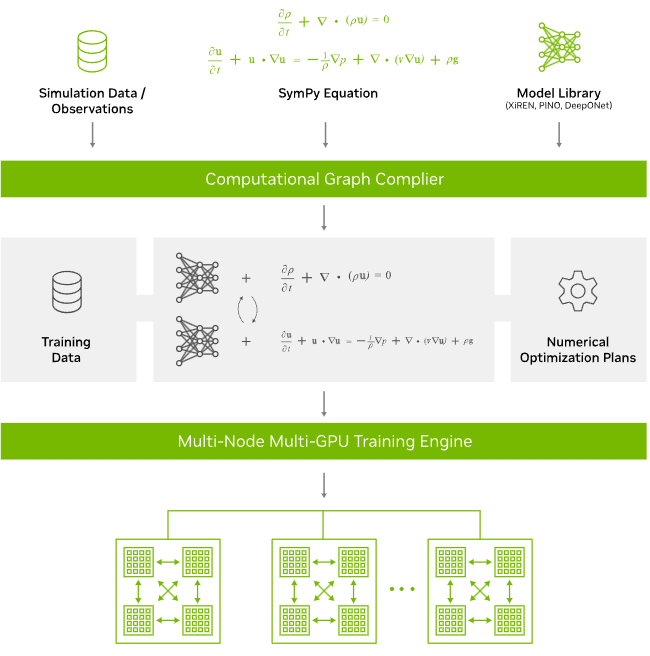
대규모 물리 모델을 실시간 또는 준실시간 레벨의 예측기로 전환하는 데 초점.
(관련 자료: NVIDIA PhysicsNeMo)
PINNs 문서 & 튜토리얼
PDE를 손실로 포함해 해를 근사하는 방법과 구현 가이드를 공식 문서에서 제공(구 Modulus 계열 문서 포함). (관련 자료: PINNs in PhysicsNeMo Sym)
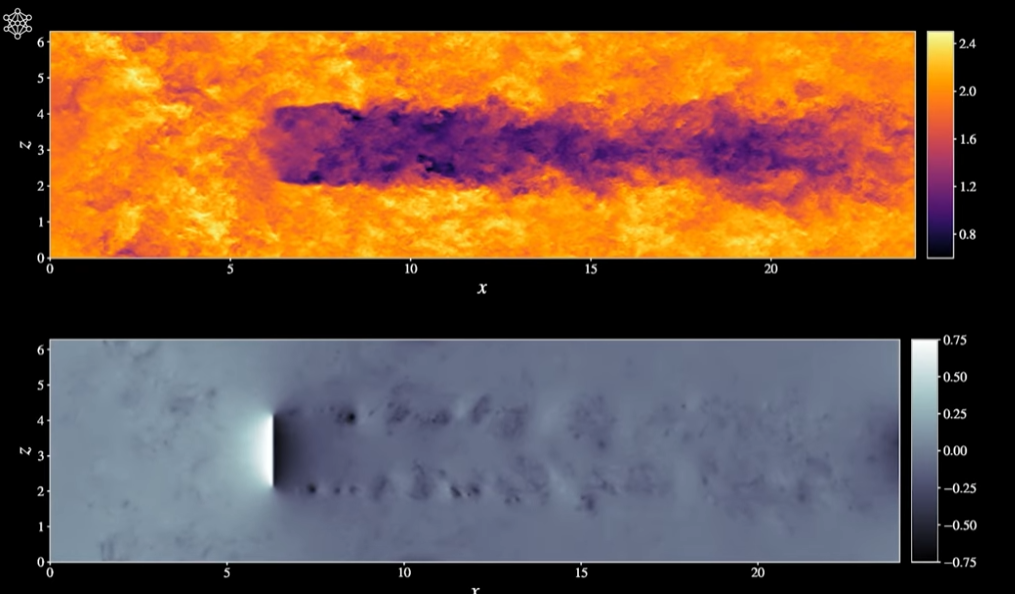
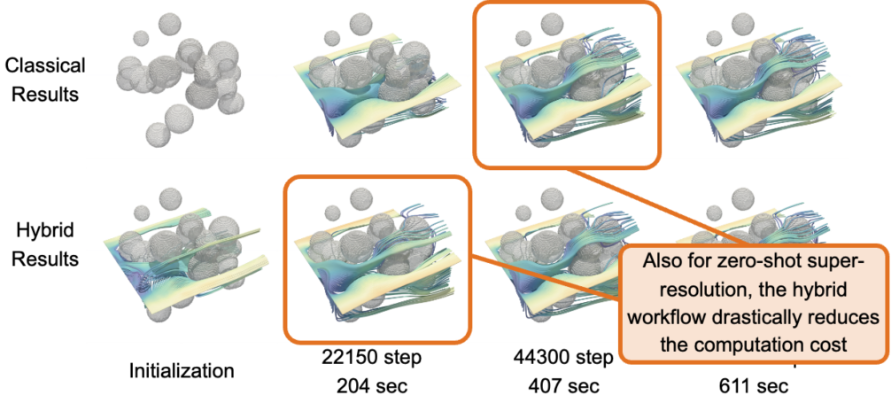
CFD/연산자 학습(FNO) 통합
PhysicsNeMo는 Fourier Neural Operator(FNO) 등 연산자 학습을 지원해 대규모 유동/열 해석의 서로게이트 모델 구축을 단순화.
(관련 자료: Transforming CFD Simulations with ML Using NVIDIA PhysicsNeMo)
Omniverse & Cosmos 연계 포인트
Cosmos(WFM): 로봇/자율주행 등 Physical-AI를 위한 월드 파운데이션 모델 플랫폼. 합성 데이터 생성, 가드레일, 가속 파이프라인을 포함(2025 발표/업데이트).
PhysicsNeMo로 만든 물리 예측기와 함께 물리 정합의 세계 모델을 구성하는 축으로 사용 가능
(관련 자료: NVIDIA Launches Cosmos World Foundation Model Platform)
Omniverse 로보틱스 라이브러리
Cosmos와 함께 로보틱스 개발, 배포를 가속하는 새로운 라이브러리/툴이 공개되어 시뮬레이션→데이터생성→학습 루프를 산업 워크플로에 연결.
(관련 자료: Developers Build Fast and Reliable Robot Simulations with NVIDIA Omniverse Libraries)
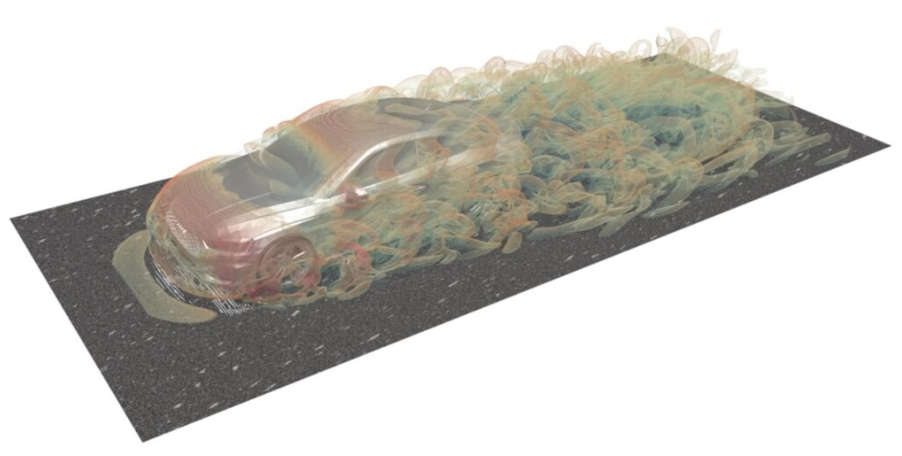
A. 제품/설계 가속(엔지니어링)
(관련 자료: Transforming CFD Simulations with ML Using NVIDIA PhysicsNeMo)
B. 디지털 트윈 & 시뮬레이션 운영
(관련 자료: Physics Informed Neural Networks in Modulus)
C. 로보틱스/자율시스템 데이터 생성
(관련 자료: NVIDIA Announces Major Release of Cosmos World Foundation Models and Physical AI Data Tools)
NVIDIA가 공개한 Omniverse+Cosmos 로보틱스 워크플로 업데이트로, 시뮬레이션, 합성데이터 생성, 학습 파이프라인이 공식화.
D. 학술/산업 혼합 사례
(관련 자료: Solving real-world optimization tasks using physics-informed neural computing)
이 글 공유하기: