Isaac Lab is a powerful reinforcement learning framework built on top of NVIDIA Isaac Sim, designed to streamline the creation, testing, and evaluation of robotic learning environments.
In this post, we’ll walk through how to run one of the key demo scripts provided by Isaac Lab, and explain the core components of its simulation pipeline.
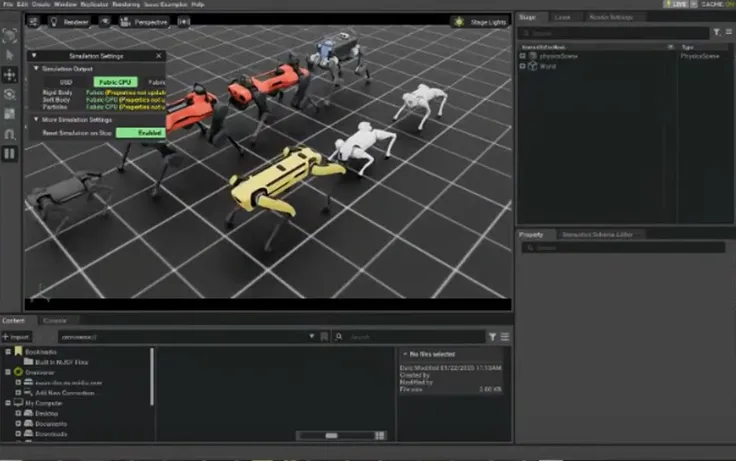
Specifically, we'll explore how to run the Showroom Demos locally, and break down functions like environment setup, robot spawning, scene design, and randomized motion initialization.
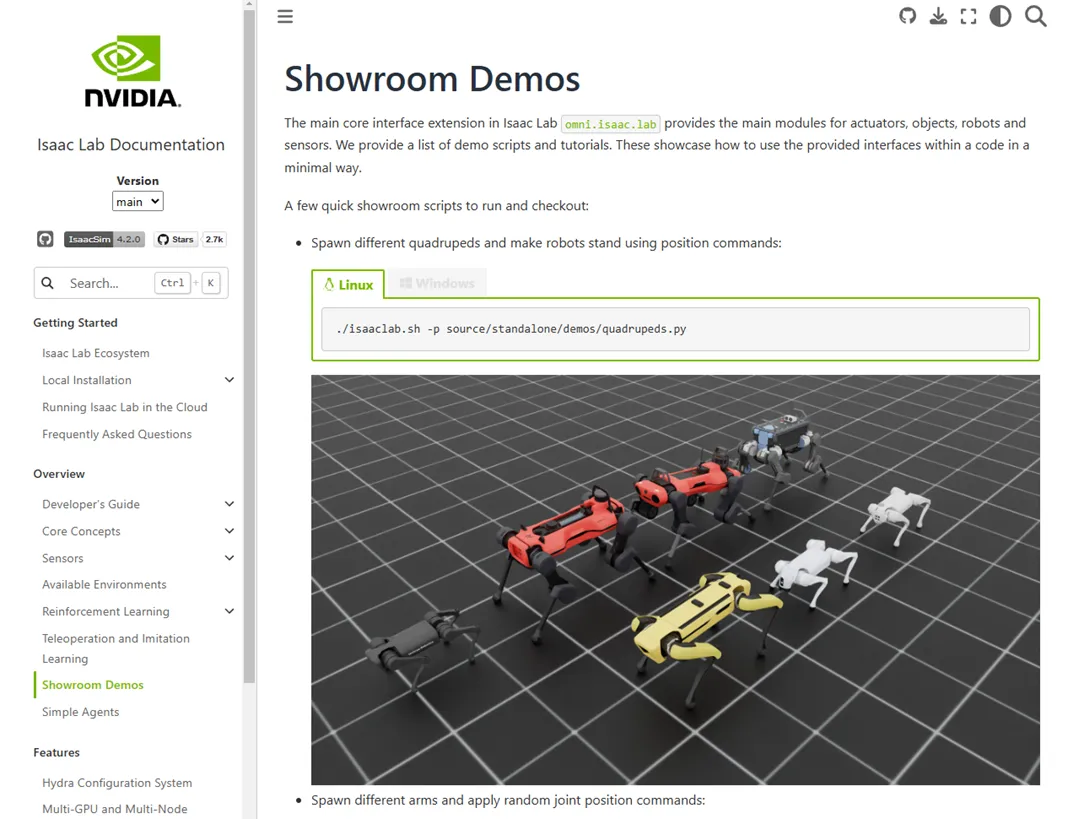
Isaac Lab offers a collection of demo scripts known as Showroom Demos, which showcase different robot types and behaviors in simulation.
Official docs:
Available Demo Scripts
Some of the built-in demo scripts you can run include:
quadrupeds.py – Simulates quadrupedal robots


To get started:
/isaac/isaacLab
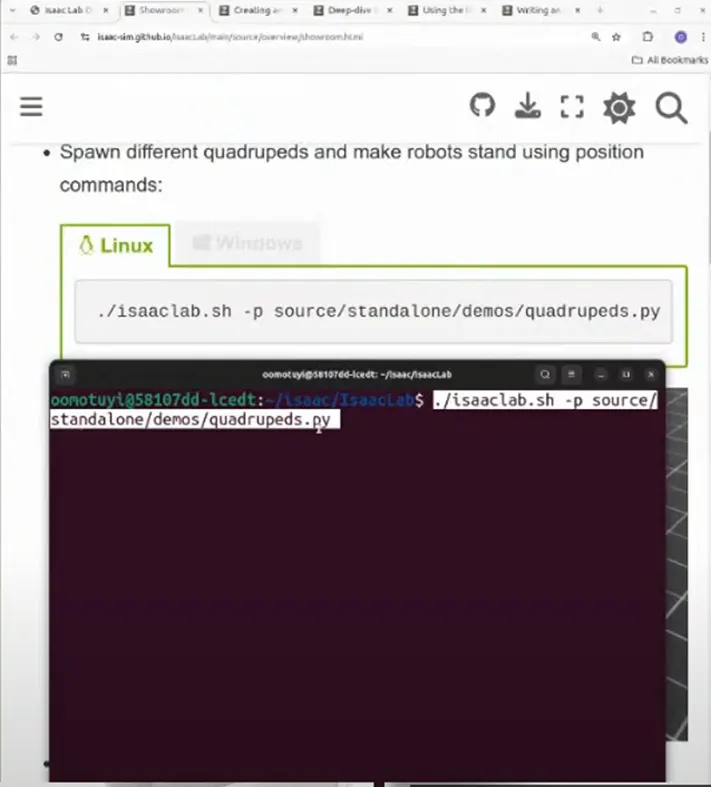
quadrupeds.py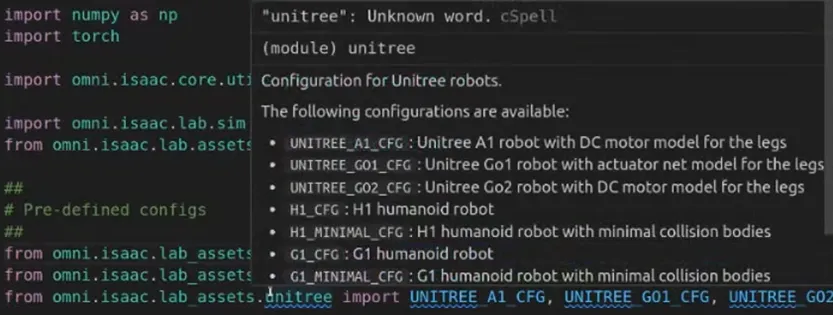
The script uses robot configurations from omni.isaac.lab_assets, which define the physical properties and control setup of various quadrupeds.
This modular setup allows you to quickly test different robot types with minimal changes to the code.
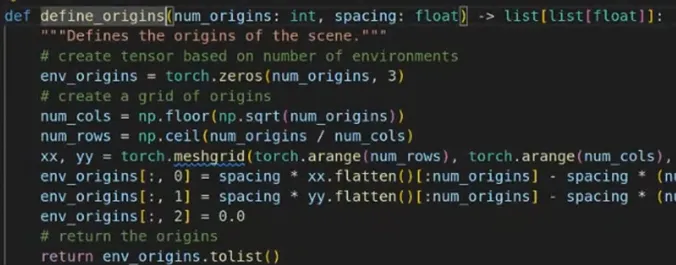
This function defines the initial positions of all environments (i.e., individual robot instances).
It returns a tensor of shape (num_envs x 3), representing the x, y, z coordinates.
This setup allows dozens or even hundreds of robots to be placed in a grid on a single simulation floor.
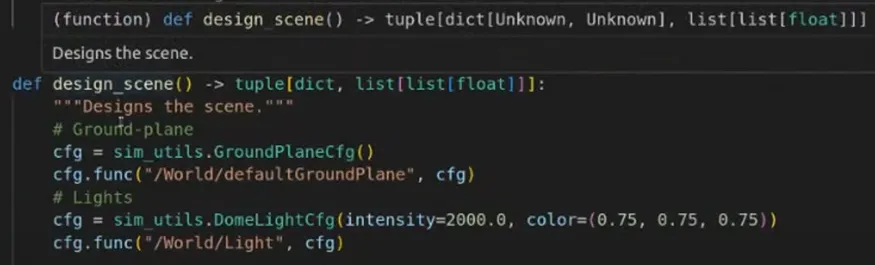
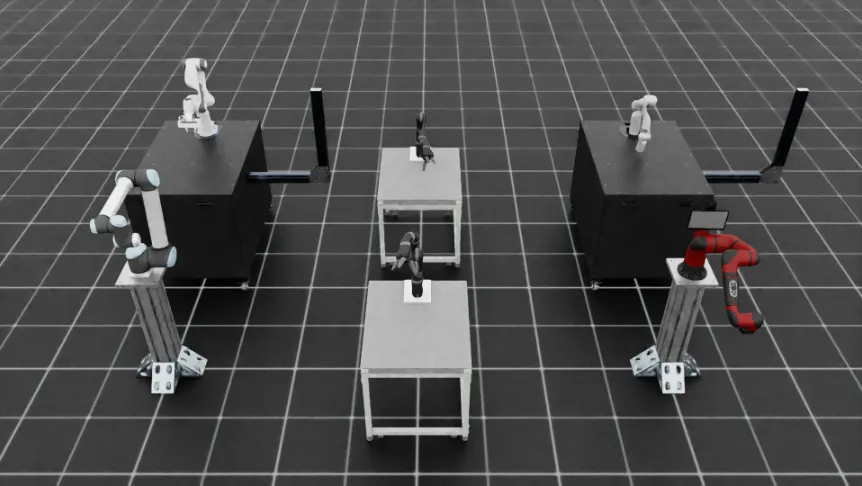
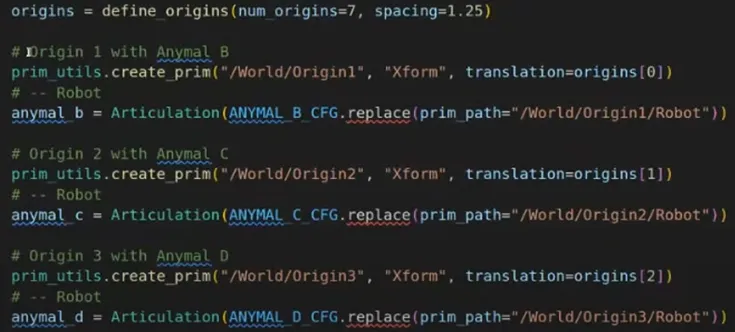
This function constructs the simulation scene, including:
While these elements can be added manually in Isaac Sim’s UI, automating them in code ensures reproducibility across training runs.
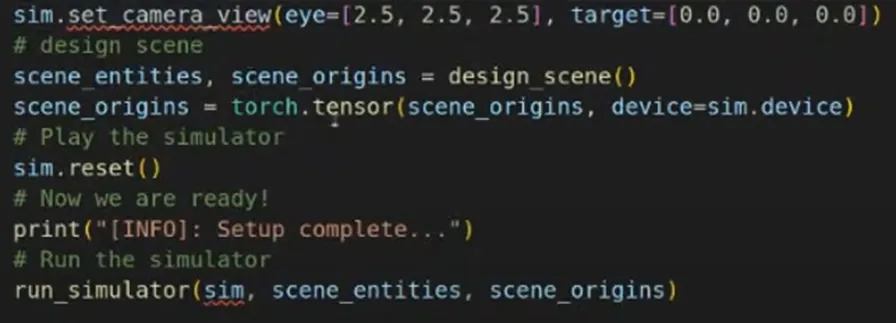
5. Initializing Origins and Running the Simulator
run_simulator() function starts the simulation once all components are defined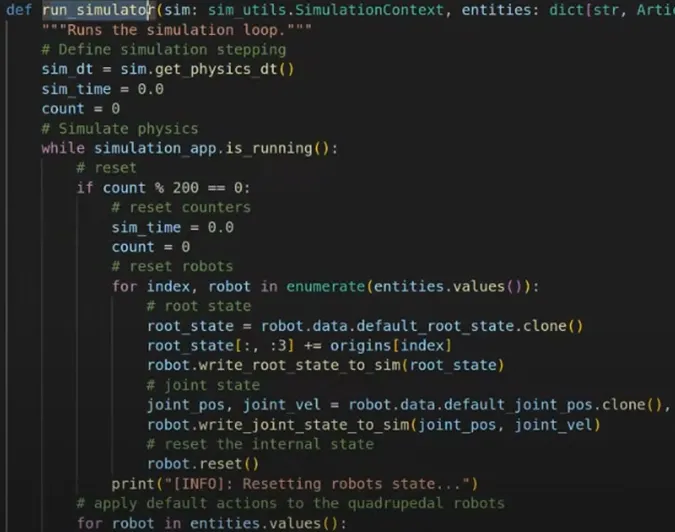
You can also configure the observation perspective using sim.set_camera_view() to define the camera angle.

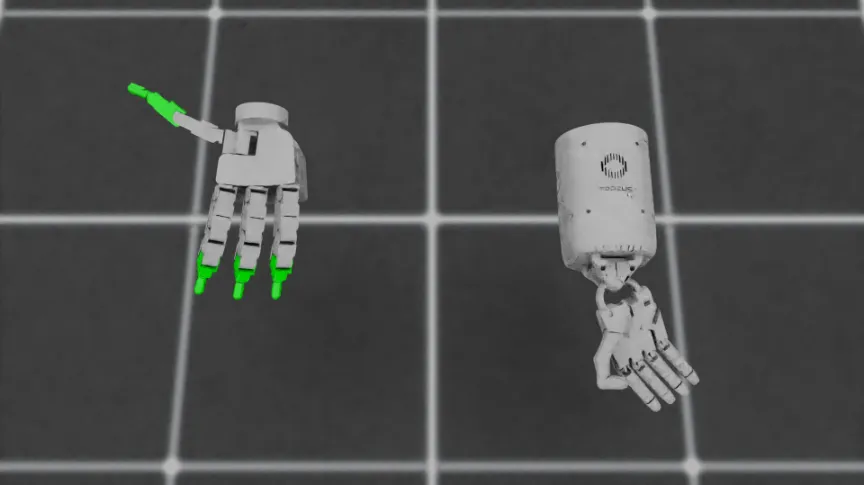
Each robot is automatically spawned into the simulation, and joint positions can be initialized with random noise:

This helps avoid overfitting and encourages learning generalizable behaviors.
The standard deviation of the noise has a significant effect:



Choosing an appropriate scale depends on the complexity of the learning task and your training objectives.
In this post, we reviewed the quadrupeds.py demo script from Isaac Lab and broke down its major components:
define_origins()design_scene()Isaac Lab is a powerful tool for:
If you're planning to develop or test RL policies using Isaac Sim, Isaac Lab gives you a clean and extensible foundation.
Share this post: