Isaac Lab, built on NVIDIA Isaac Sim, is a modular reinforcement learning framework that simplifies how you configure and run simulation environments.
In this post, we explore how to use the InteractiveScene class in Isaac Lab to efficiently build and manage simulation environments—including floors, lighting, and robots—with minimal code.
With InteractiveScene, you no longer have to manually define each scene element. Instead, you can automatically spawn everything from config classes, and even control the number of environments at runtime using CLI arguments—ideal for reinforcement learning experiments.
https://isaac-sim.github.io/IsaacLab/main/source/tutorials/02_scene/create_scene.html
📷 [Insert image describing InteractiveScene concept]
The scene.InteractiveScene class allows you to spawn a complete simulation environment—including ground plane, lighting, robots, and sensors—from configuration classes.
It simplifies what would otherwise require dozens of manual steps, and makes the scene modular, reusable, and easy to scale.
To dynamically control the number of environments during execution, add a CLI argument like this:

type=int: ensures the input is an integerdefault=2: if omitted, two environments will be created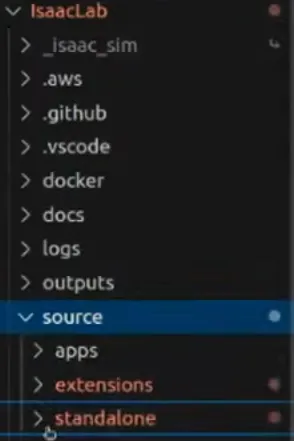
Key directories in the Isaac Lab repository:
source/standalone: Demos, tutorials, and RL pipelinesextensions: Core features and configuration assets omni.isaac.lab: Main simulation logicomni.isaac.lab.assets: Contains robot/environment config fileslab.tasks: Task definitions for robots (e.g., locomotion, manipulation)
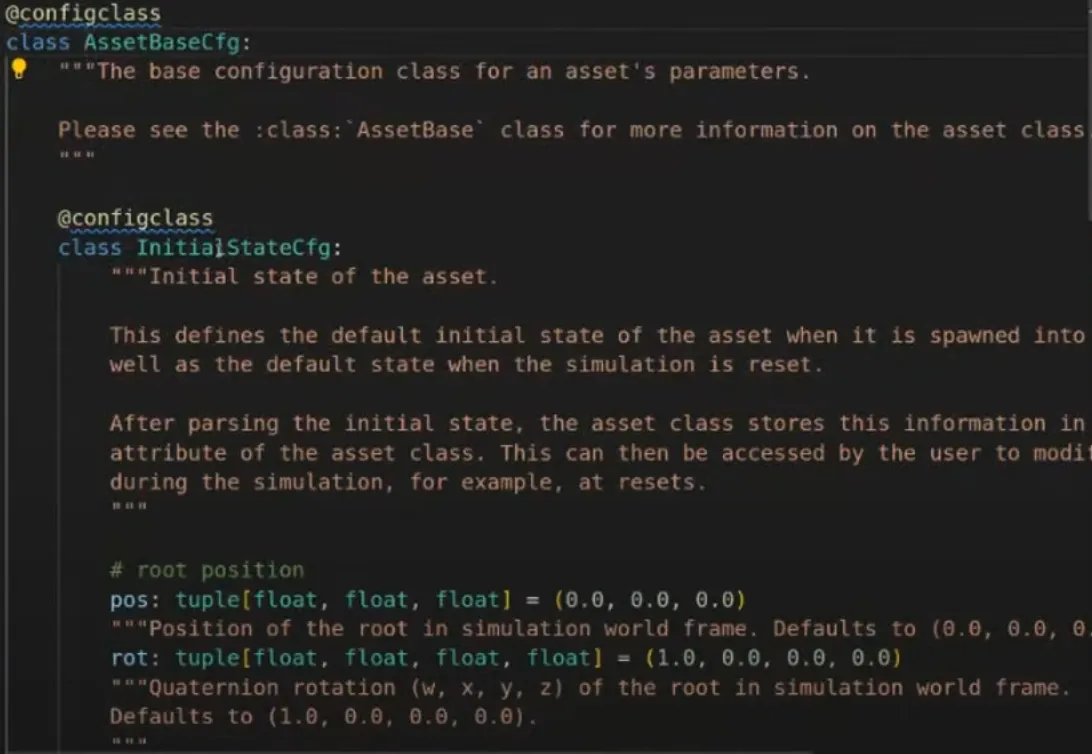
Here are the essential classes used to configure simulation elements:
ArticulationCfg: For movable robots or armsAssetBaseCfg: For fixed assets like ground or wallsInteractiveSceneCfg: Master config for lights, robots, and groundInteractiveScene: The main class that generates the actual sceneSimulationContext: Controls simulation playback (step, pause, etc.)Isaac Lab uses the @configclass decorator to define structured configs that are validated and used during runtime.

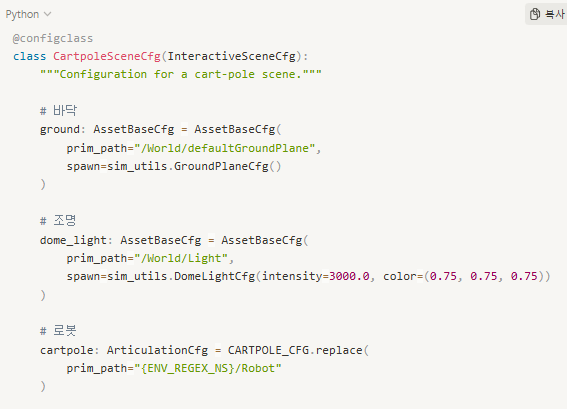
Here’s an example of a simple scene config for a cartpole robot:
{ENV_REGEX_NS}In Omniverse USD scenes:


/World/...) for shared, global assets like lights or ground
{ENV_REGEX_NS}/...) for environment-specific assets like robots or tables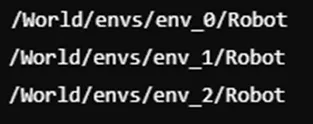
For example, if --num_envs=32, you’ll get 32 unique environments—each with its own robot or object—when using relative prim paths.

You can run the simulation with custom environment counts using CLI like this:


./isaaclab.sh -p my_scene.py --num_envs 32
This will spawn 32 environments, and each robot (or sphere) will be generated independently.
This pattern is essential for scaling up to parallel training environments in RL.
In this post, we covered how to use Isaac Lab’s InteractiveScene class to build modular simulation environments.
Here’s what we learned:
InteractiveScene helps spawn all scene elements automatically@configclass to structure reusable settings-num_envs allow dynamic scaling for multi-agent or multi-robot simulationsIsaac Lab provides a robust and flexible simulation backend for reinforcement learning, and these tools make it easy to manage scalable, reproducible environments.
Share this post: