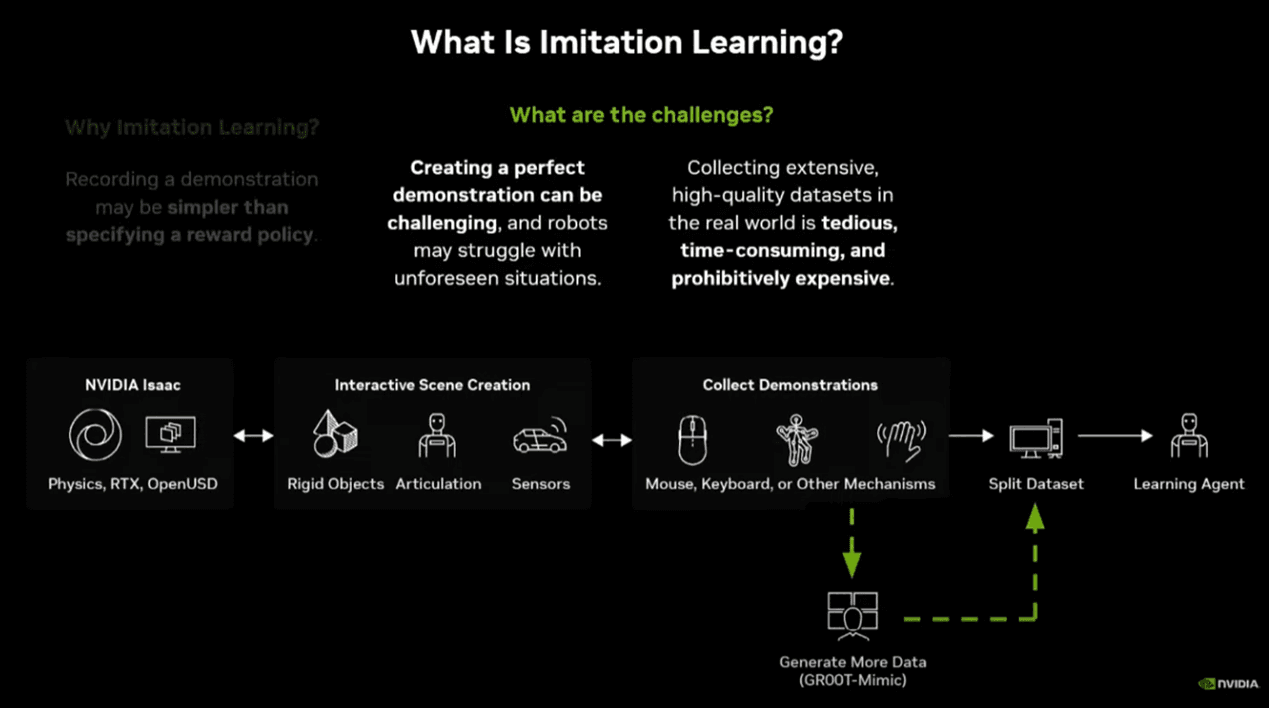
What is Imitation Learning?
Key Message
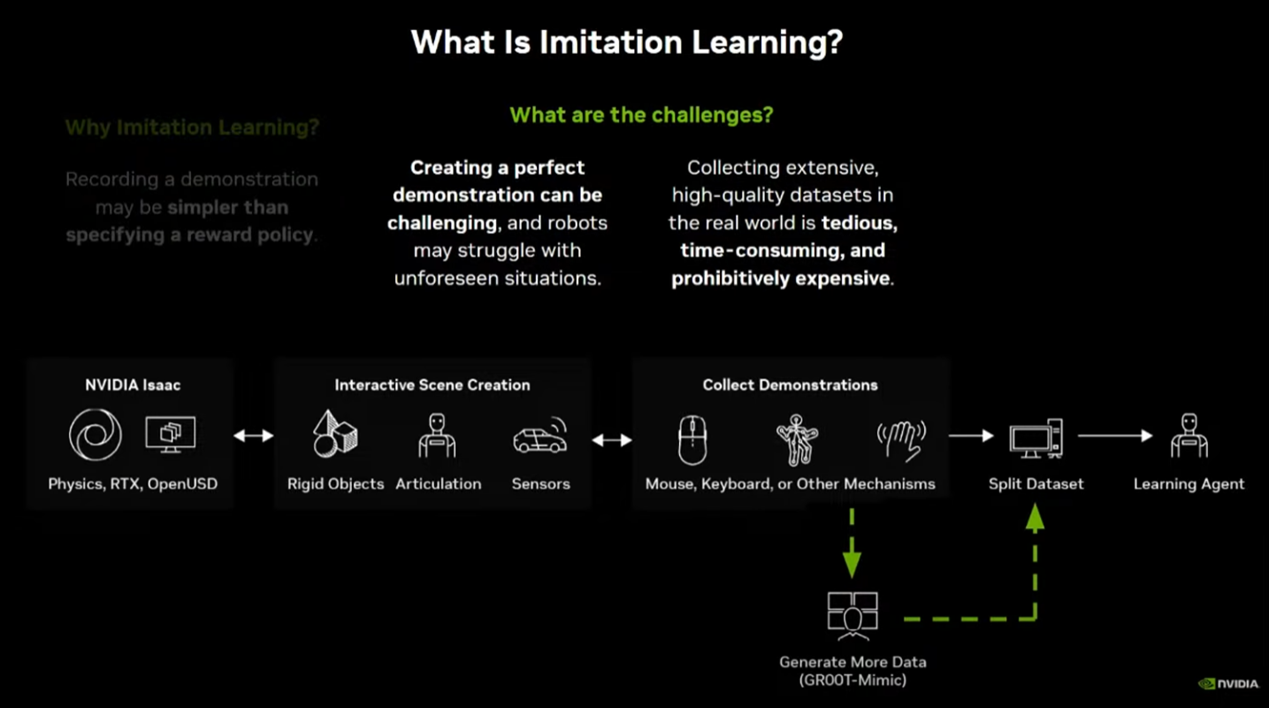
Imitation Learning is a technique that enables robots to learn how to perform tasks by observing human demonstrations. This approach can be more intuitive than designing a reward function manually, as done in reinforcement learning. However, collecting large-scale high-quality demonstrations is extremely challenging, time-consuming, and costly.
Summary
- Purpose of Imitation Learning
- Instead of defining complex reward functions, robots learn control policies from human demonstration data.
- This intuitive approach reduces the burden of manually designing training policies.
- Challenges
- Generating perfect and consistent demonstrations is difficult.
- Robots often struggle to generalize learned demonstrations to new or unseen situations.
- Need for Large-Scale Data
- Robot learning typically requires thousands to tens of thousands of demonstrations.
- Manually performing the same task repeatedly to collect such data is inefficient in terms of time and cost.
- Solution
- Physically accurate simulation environments (e.g., NVIDIA Isaac) can be used to generate large-scale data.
- Synthetic data significantly improves training speed and efficiency.
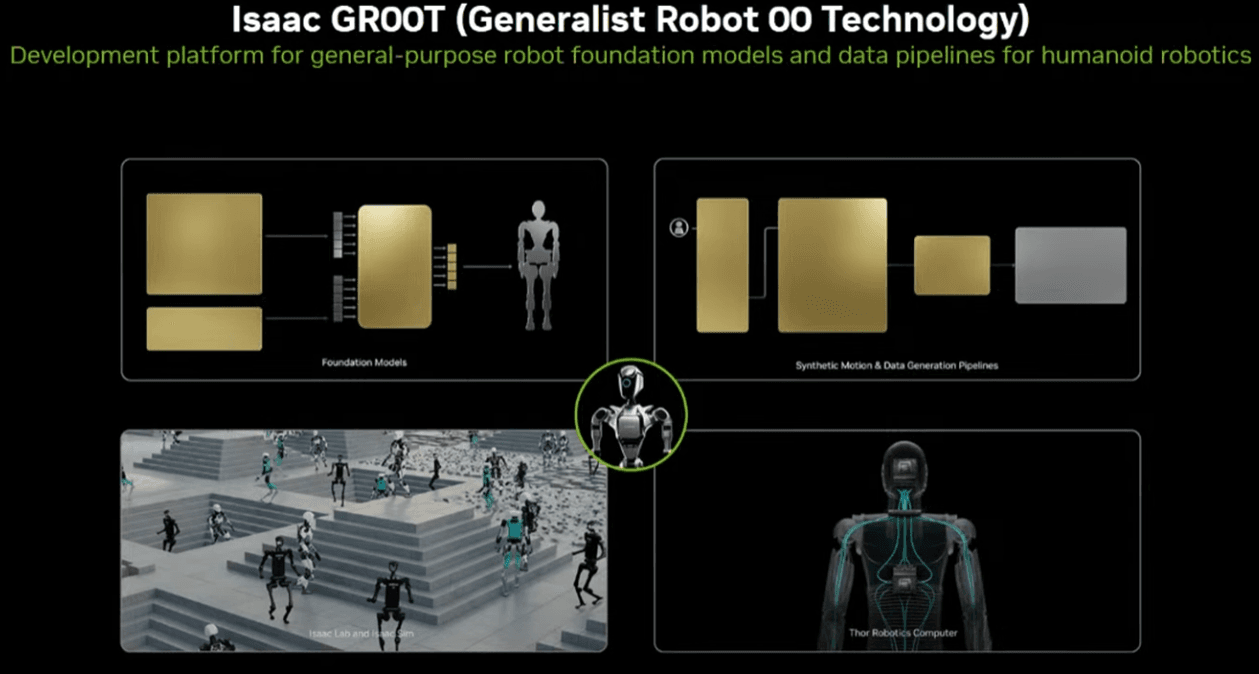
Key Message
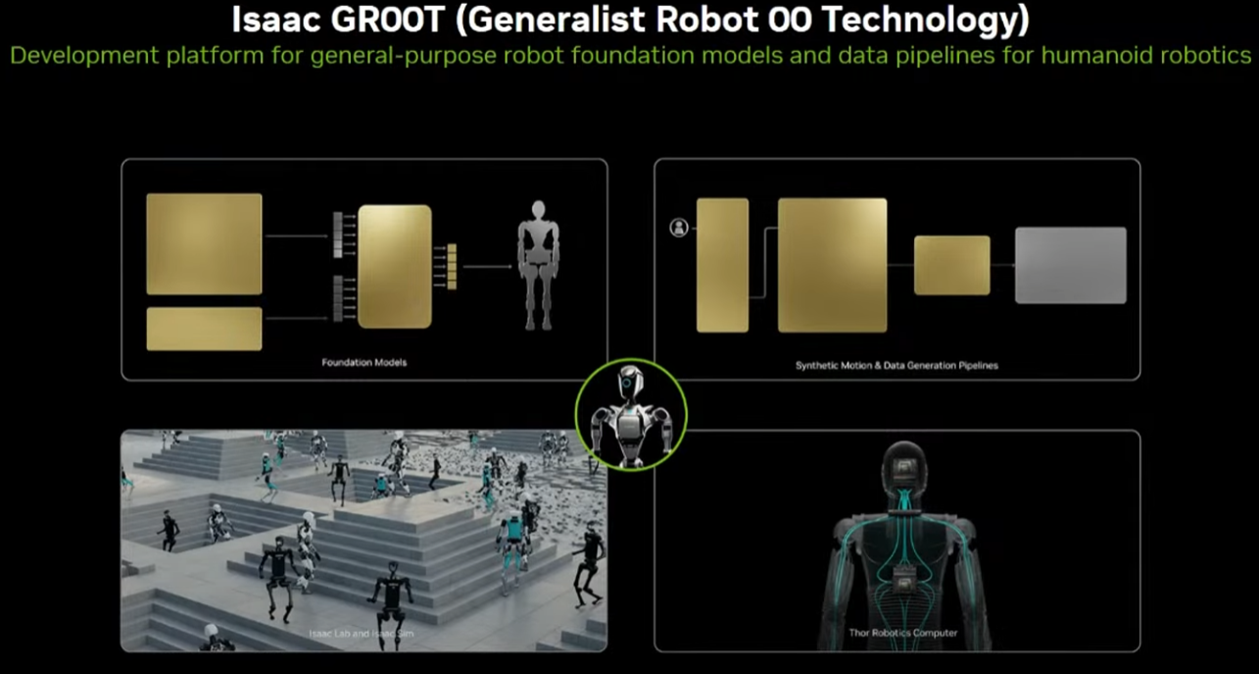
Isaac GR00T is an NVIDIA development platform designed to support general-purpose robot development and large-scale generation of training data. It enables the creation of realistic large-scale datasets to accelerate robot learning and helps developers efficiently build both control logic and training data.
Summary
- Development Goals of Isaac GR00T
- Develop a pipeline for general-purpose robot development and training data generation.
- Produce large-scale data required for learning robot motion and perception.
- Data Generation and Scalability
- Applicable to various robots and scenarios (e.g., human–robot interaction, specific tasks).
- Capable of generating thousands of datasets within a few hours.
- Greatly improves robot learning speed.
- Connected Solutions
- Provides a workflow integrated with Isaac Lab and Isaac Sim for data generation and deployment.
- Within Isaac GR00T, various workflows enable the generation of motion and data equivalent to real robots.
- Objectives
- Improve development speed and efficiency to shorten the time to real-world deployment.
- Reduce the burden of data creation and optimize learning performance.
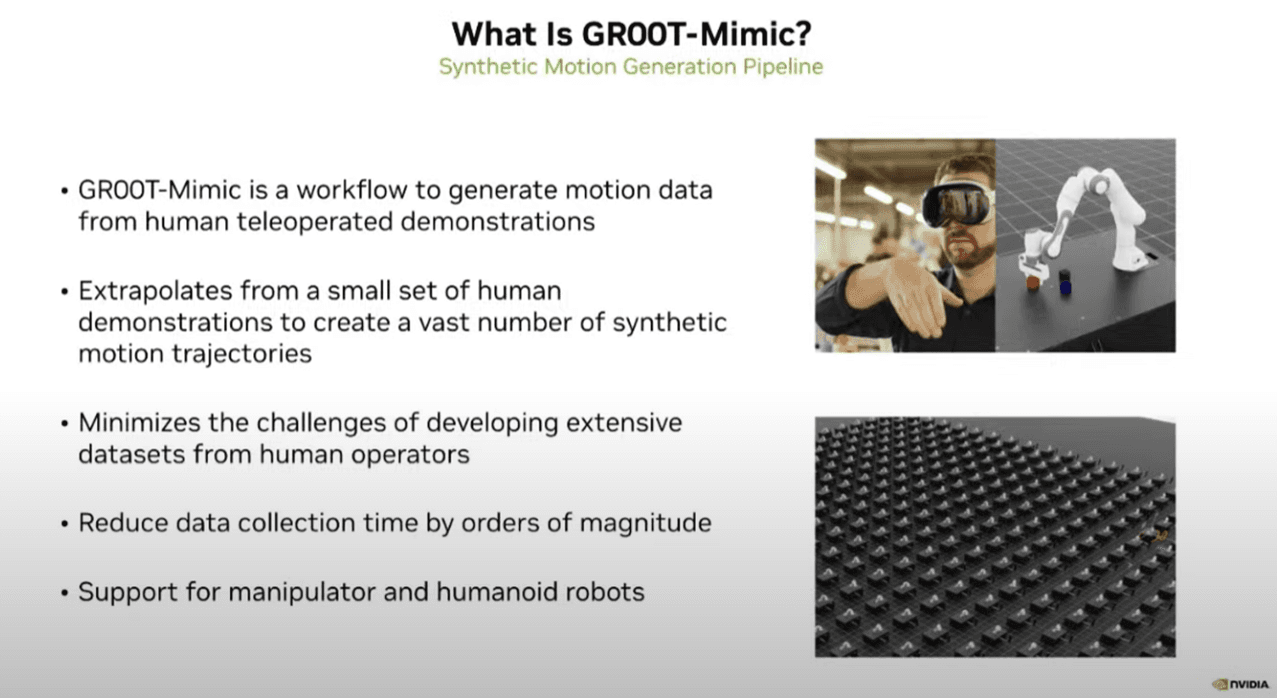
What is GR00T‑Mimic?
Key Message
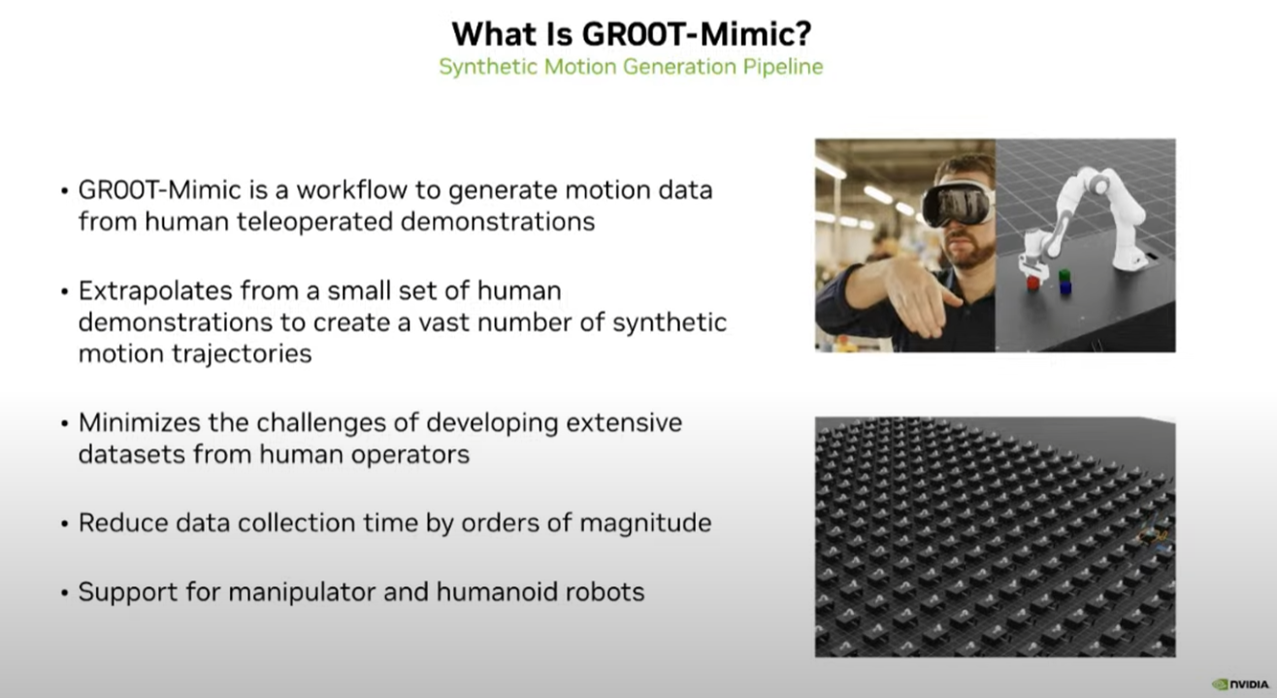
GR00T-Mimic is a workflow that automatically generates large-scale synthetic robot motion data using only a small number of human demonstration samples. This significantly reduces the time, cost, and effort required for data collection, and enables the creation of new situations and trajectories.
Summary
- Concept of GR00T-Mimic
- Generates robot motion data from human teleoperation demonstrations.
- A small number of demonstrations can be expanded into large-scale synthetic motion data.
- Addressing the Challenge
- Collecting large amounts of human demonstration data requires significant time, cost, and manpower.
- For example, generating 5–10 demonstrations is feasible, but generating 10,000 is nearly impossible.
- Strengths of GR00T-Mimic
- Produces high-quality large-scale data from a small number of demonstrations.
- Capable of generating not only original scenarios but also entirely new conditions (e.g., different robots, object placements).
- Use Cases
- Applicable to human–robot collaboration tasks and various robot manipulation scenarios.
- Significantly increases learning speed and reduces development cost.
- Core Principle
- Generates new motion trajectories and task scenarios from original demonstrations.
- Expands beyond the limitations of the original dataset to new and diverse situations.
Synthetic Manipulation Motion Generation
Key Message
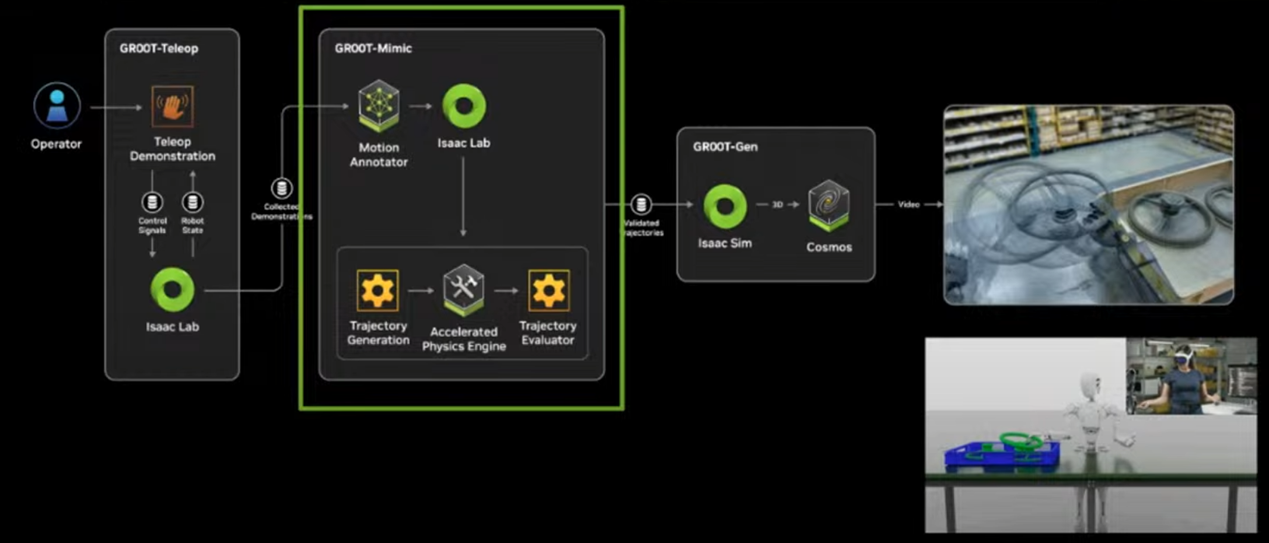
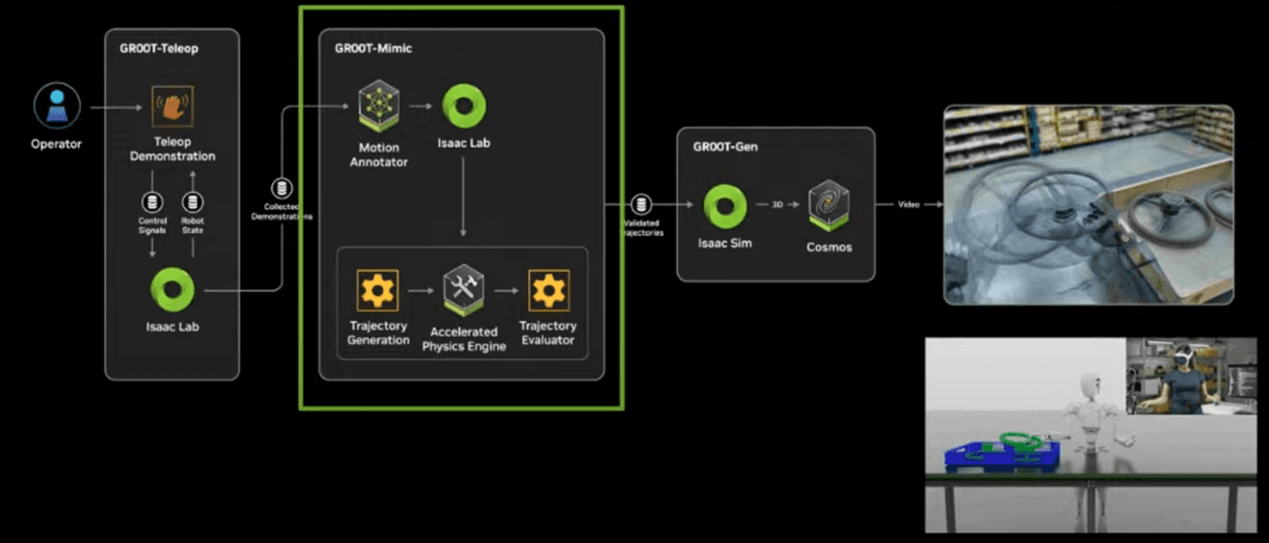
GR00T-Mimic is a core technology that generates new robot motion paths from teleoperated demonstrations and expands them into large-scale training datasets.
Summary
- Remote Demonstration Data Collection (GR00T-Teleop)
- Human operators control the robot remotely to create initial sample data.
- High-quality demonstrations provide the foundation for training.
- Trajectory Generation (GR00T-Mimic)
- New motion paths can be generated from original demonstration data.
- Combined with the Isaac Lab physics engine, datasets can be expanded tens to thousands of times.
- Visual and Environmental Diversification (GR00T-Gen + Cosmos)
- Existing trajectories are randomized under various visual and environmental conditions.
- Examples include changes in background, lighting, or object colors.
- When integrated with NVIDIA Cosmos, large-scale training datasets can be generated.
- Scaling Learning Data
- Starts with a few dozen original demonstrations and expands to thousands using GR00T-Mimic.
- When combined with Cosmos, the dataset can reach hundreds of thousands or even millions.
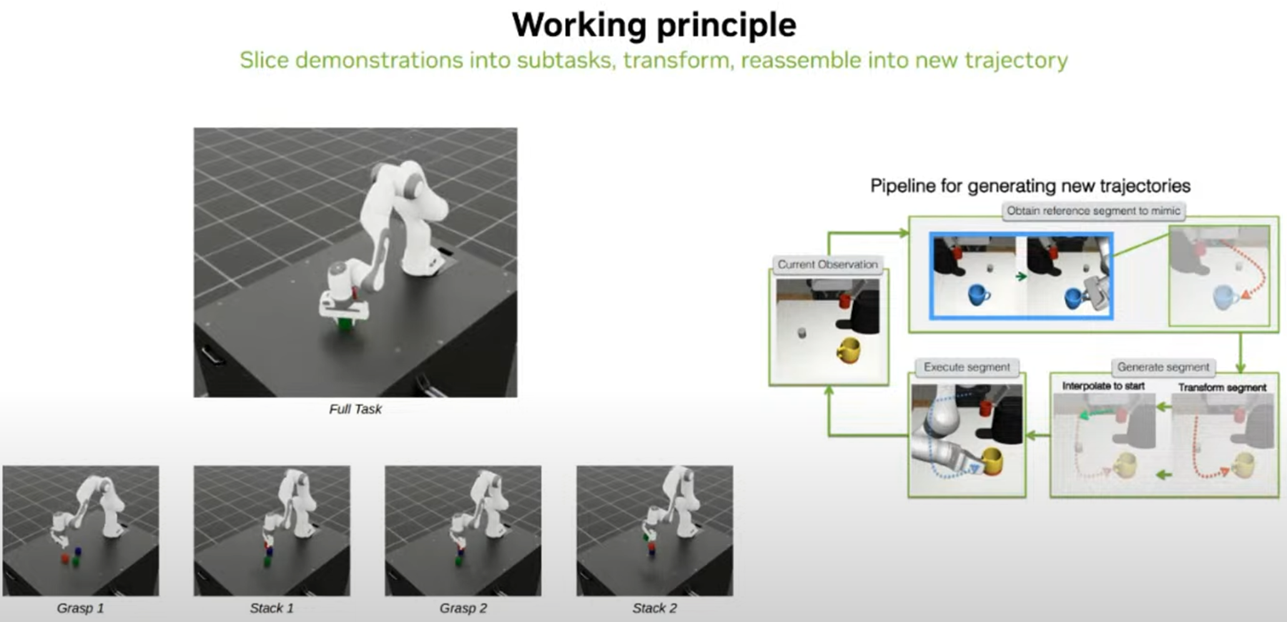
How GR00T-Mimic Works: Subtask Decomposition and New Trajectory Generation
Key Message
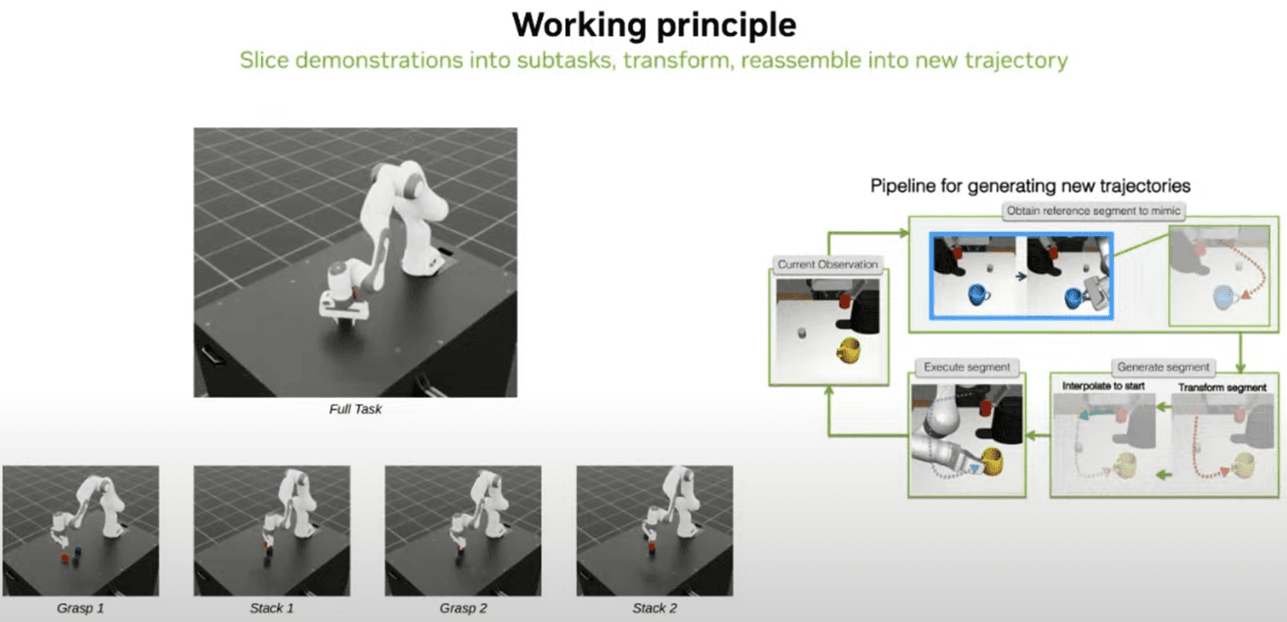
GR00T-Mimic breaks down human demonstration data into smaller subtasks, stores them, and recombines them to generate new motion paths when new situations arise. These generated paths are validated within Isaac Lab, and successful ones are accumulated into large-scale datasets.
Summary
- Decomposing Original Tasks into Subtasks
- The original demonstration is divided into sections where the robot interacts with specific objects.
- Example: In a stacking task, subtasks include “grasp red block,” “lift,” and “place.”
- Reconstructing Paths for New Scenarios
- When a new scenario occurs, the system finds the most similar subtask in the original data.
- The original trajectory is adapted to match new objects, positions, or environments.
- Interpolation Between Paths
- The gap between the robot’s current state and the new trajectory is smoothly connected through interpolation.
- This ensures that the robot follows the new path without instability.
- Validation and Data Accumulation
- Generated paths are simulated in Isaac Lab.
- If successful, they are stored as part of the training dataset.
- Failed trajectories are discarded and regenerated to improve accuracy and quality.