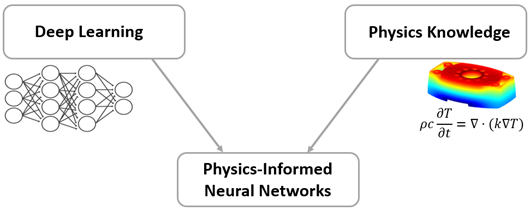
PINNs (Physics-Informed Neural Networks) are
analytical neural networks embedded with physical constraints,
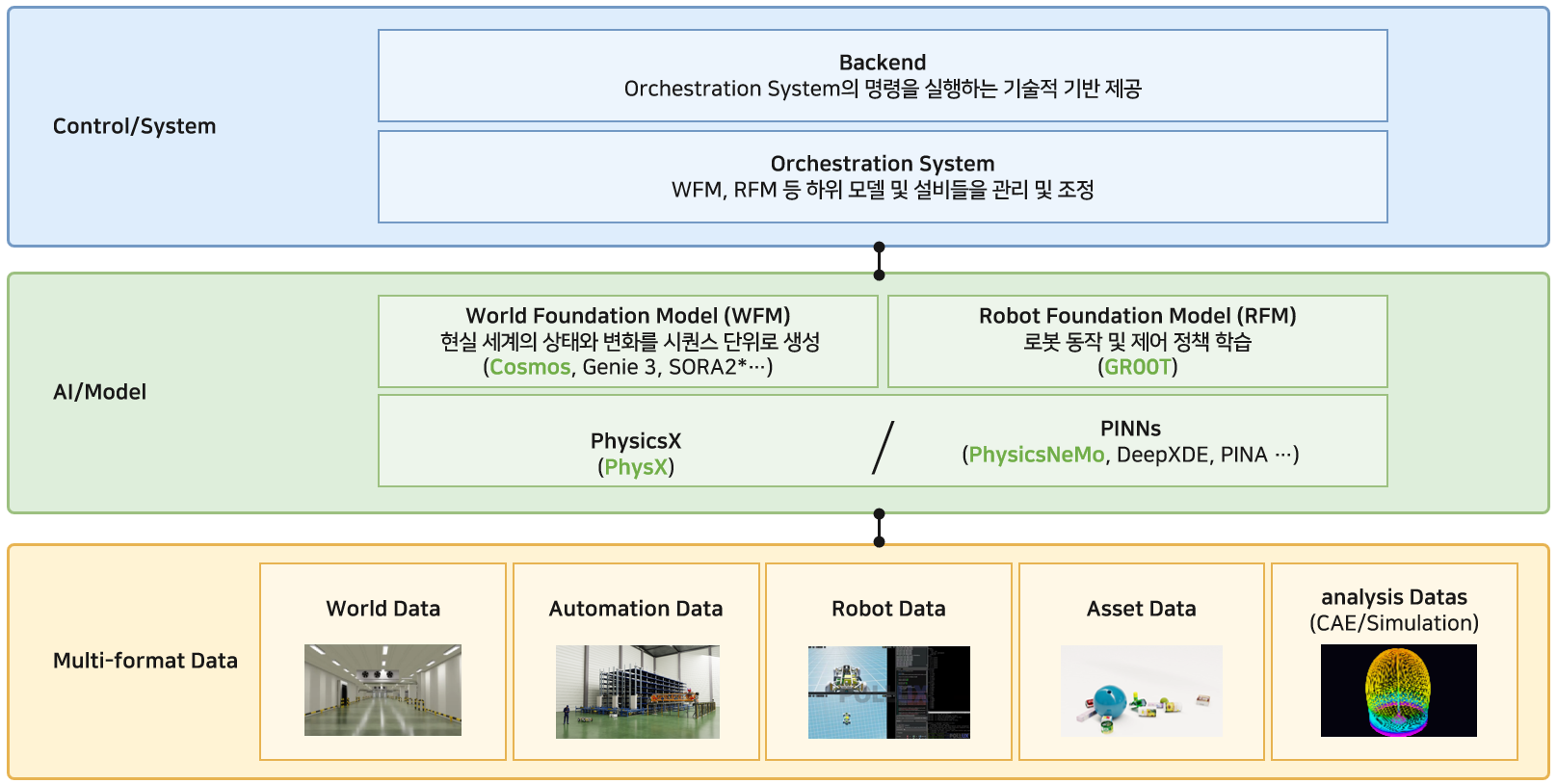
the World Model is a
representation model that compresses and predicts the dynamics of an environment,
and the Robot Foundation Model is a
large-scale action model integrating perception and behavior.
┌───────────────────────────────────────────────┐
│ Physics Layer (PINNs) │
│───────────────────────────────────────────────│
│ • Embedding physical equations (PDEs, BCs) │
│ • Learning continuous solution functions │
│ • Generating physics-consistent synthetic data│
└──────────────┬────────────────────────────────┘
│ Providing physically consistent data
▼
┌───────────────────────────────────────────────────┐
│ Cognitive Layer (World Foundation Model) │
│───────────────────────────────────────────────────│
│ • Latent representation of environmental dynamics │
│ • Counterfactual prediction / imagined worlds │
│ • Learning world models based on physics │
└──────────────┬────────────────────────────────────┘
│ Providing simulated environments
▼
┌─────────────────────────────────────────────────┐
│ Behavioral Layer (Robot Foundation Model) │
│─────────────────────────────────────────────────│
│ • Integrated learning of vision/language/action │
│ • Learning generalized behavior policies │
│ • Transfer of skills from simulation to reality │
└──────────────┬──────────────────────────────────┘
│ Real-world feedback (sensors, actions)
▼
┌───────────────────────────────────────────────┐
│ Feedback Loop (Self-Consistency) │
│───────────────────────────────────────────────│
│ • RFM → WFM: Refining prediction accuracy │
│ • WFM → PINNs: Adjusting physical boundaries │
│ • PINNs → RFM: Ensuring physical stability │
└───────────────────────────────────────────────┘

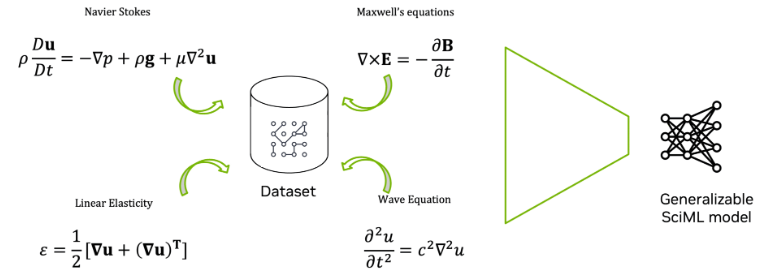
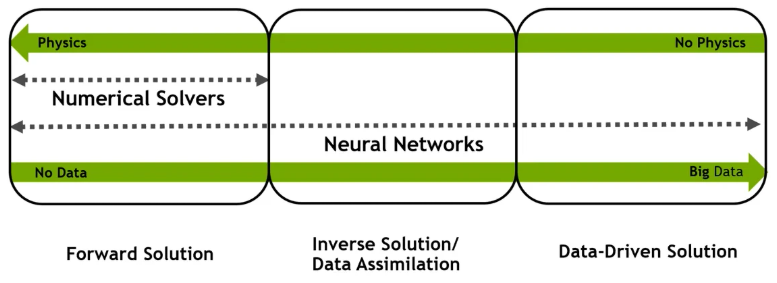
PINNs are neural networks that embed physical laws directly into the loss function to learn functions that satisfy those equations.
Traditional numerical methods (FEM, CFD, etc.) divide space into grid points and repeatedly compute values at each node, whereas PINNs approximate the entire space with a single continuous function.
In other words, instead of memorizing values at specific points, the neural network internalizes the form of solutions that satisfy physical equations.
The key is physics-based learning. Because PINNs use PDEs and boundary conditions directly as training objectives, they can be trained even with limited data, offer strong generalization to new boundaries or conditions, reduce computational costs of physical simulations, and generate large-scale physically consistent synthetic data.
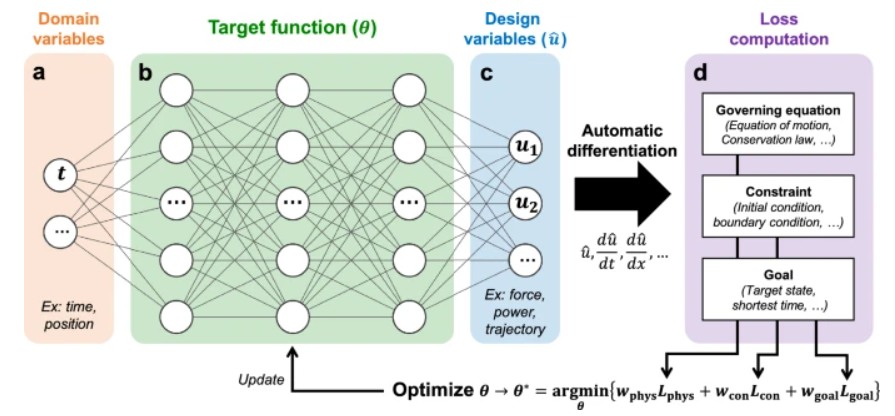
The most explicit objective of PINNs is:
“To approximate solutions of differential equations not through numerical data, but within the structure of the neural network itself.”
That is, rather than numerically solving PDEs like FEM or CFD, PINNs learn a function that inherently satisfies those equations.
This approach is fundamentally about representation, not repeated computation.
Once trained, a PINN can instantly output a continuous solution at any coordinate, even outside of grid points.
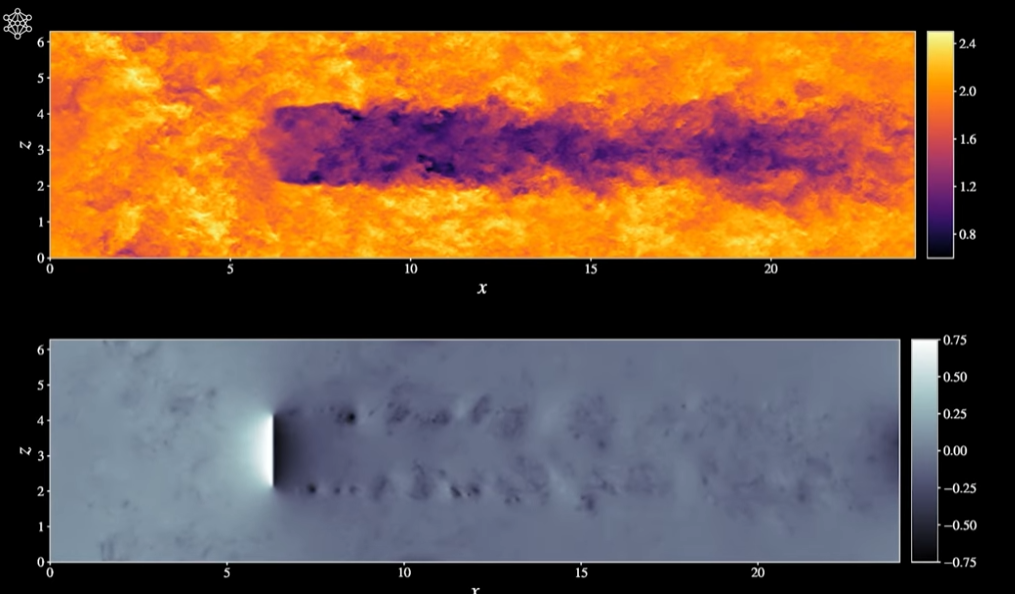
Real-world phenomena almost always occur at the interfaces of multiple physical domains:
Traditional numerical solvers treat domains like fluid, structure, and thermal separately, exchanging values at boundaries — causing discontinuities and instability.
PINNs instead learn all relevant physical equations within a single neural function, jointly approximating fluid PDEs, solid PDEs, and thermal equations in one continuous solution space.
https://github.com/lululxvi/deepxde
https://github.com/mathLab/PINA
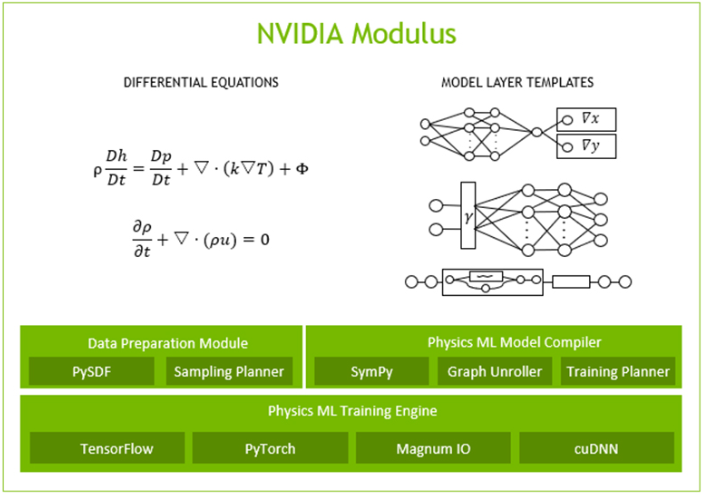
PhysicsNeMo
An open-source physics-ML framework that enables large-scale training and inference for PINNs, FNOs, and other SciML models (Python-based, open-source).
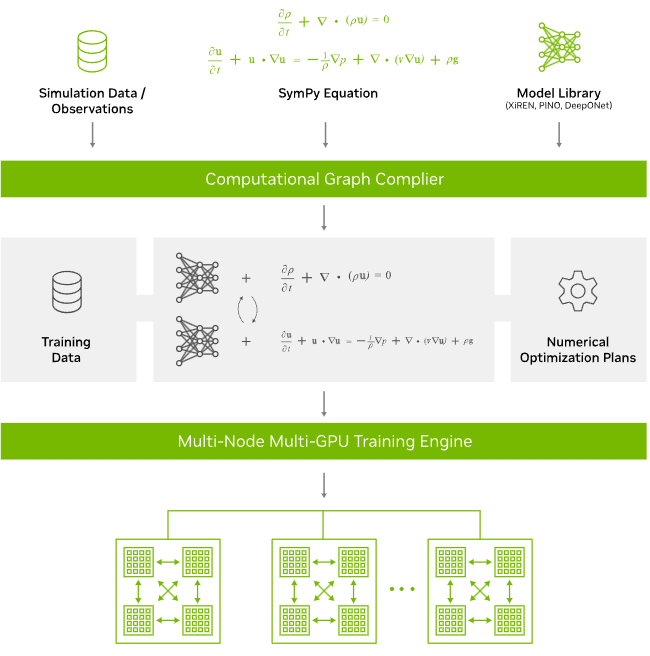
Focused on transforming large physics models into real-time or near real-time predictors.
(Reference: NVIDIA PhysicsNeMo)
PINNs Documentation & Tutorials
Official documentation provides guidance on how to incorporate PDEs into loss functions and implement physics-informed learning (includes legacy Modulus documentation as well).
(Reference: PINNs in PhysicsNeMo Sym)
CFD / Operator Learning (FNO) Integration
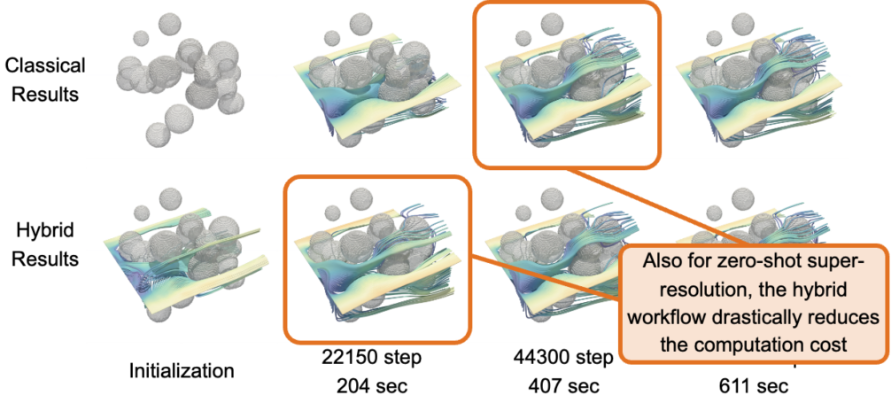
PhysicsNeMo supports Fourier Neural Operator (FNO) implementations to simplify the creation of surrogate models for large-scale fluid or thermal simulations.
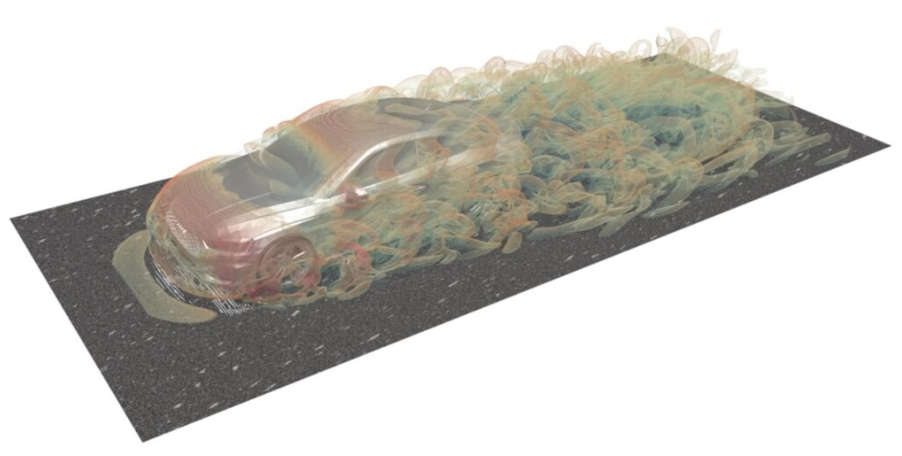
(Reference: Transforming CFD Simulations with ML Using NVIDIA PhysicsNeMo)
Omniverse & Cosmos Integration Points
Cosmos (WFM): A World Foundation Model platform for Physical AI (robots, autonomous driving, etc.). Supports synthetic data generation, guardrails, and accelerated pipelines (announced/updated in 2025).
Together with PhysicsNeMo-based physics predictors, Cosmos can be used to construct a physically consistent world model.
(Reference: NVIDIA Launches Cosmos World Foundation Model Platform)
Omniverse Robotics Libraries
New robotics libraries/tools were released to accelerate workflows from simulation → data generation → training, in conjunction with Cosmos.
(Reference: Developers Build Fast and Reliable Robot Simulations with NVIDIA Omniverse Libraries)
A. Product/Design Acceleration (Engineering)
(Reference: Transforming CFD Simulations with ML Using NVIDIA PhysicsNeMo)
B. Digital Twin & Simulation Operations
(Reference: Physics Informed Neural Networks in Modulus)
C. Robotics / Autonomous Systems Data Generation
(Reference: NVIDIA Announces Major Release of Cosmos World Foundation Models and Physical AI Data Tools)
NVIDIA’s Omniverse + Cosmos robotics workflow update formalizes pipelines for simulation, synthetic data generation, and training.
D. Academic/Industrial Hybrid Cases
(Reference: Solving real-world optimization tasks using physics-informed neural computing)
Share this post: